March 10, 2014
Submersible crawling swimming and shape-changing robots for inspection prior to removal of fuel at Fukushima Daiichi Nuclear Plant
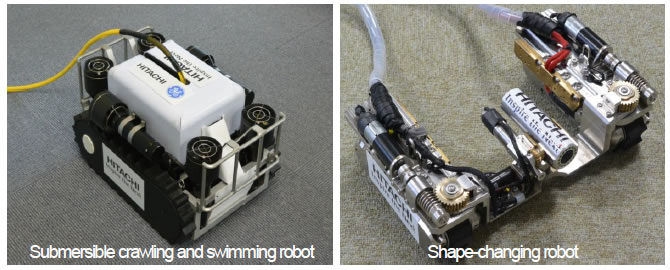
Hitachi, Ltd. and Hitachi-GE Nuclear Energy, Ltd. ("HGNE") today announced the joint development of a submersible crawling and swimming robot (crawler) and a shape-changing robot (crawler) which freely modify shape or posture to avoid obstacles even in narrow spaces to remotely explore wide areas. Hitachi and HGNE have developed these robots to conduct various investigations ahead of the remote equipment to be developed under the project supported by the Agency for Natural Resources and Energy, Japan, to remove the fuel at the Fukushima Daiichi Nuclear Power Plant. The submersible crawling and swimming robot and the shape-changing robot can move in water and on land, respectively, in areas where human entry is difficult due to narrow spaces or obstacles, and can be used to investigate leakage points in coolants as well as the state of fuel.
Details of these two robots will be presented at the Annual Meeting of the Atomic Energy Society of Japan (ASEJ), to be held from 26th to 28th March at the Tokyo City University, Tokyo, Japan.