To automate human works in factories and logistics warehouses by robots
August 6, 2019
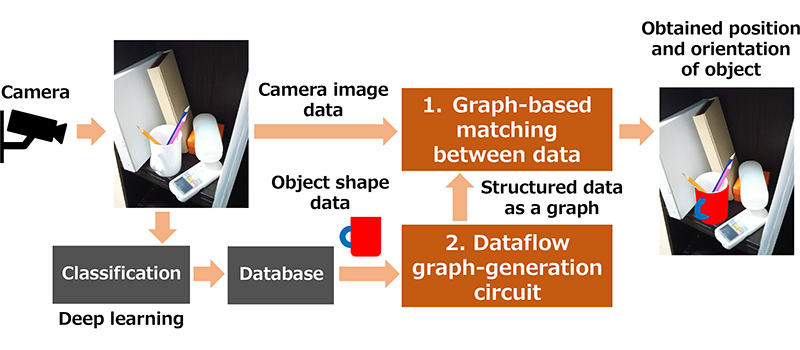
Overall system for recognition of arbitrary-shaped objects using proposed techniques
Hitachi, Ltd. today announced the development of a fast matching technique between the image data captured by a 3-D camera(1) and the object shape data classified by AI. By using this technique, the complicated objects with flat and curved surfaces have been recognized successfully in real-time. In contrast to the conventional technique which assigns the points of the object shape data corresponding to those of the image data one by one, the proposed technique can assign plural points simultaneously by structuring the object shape data as a graph to hold the relations among the neighboring points. Using this technique, the matching speed was accelerated by a factor of around 10(2) compared with the conventional technique and Hitachi demonstrated the recognition of the object position and orientation within around 0.6 seconds for complicated objects such as a coffee cup placed disorderly in a shelf. Through applying this technique to industrial robots, Hitachi will continue to develop the automation and acceleration technology with the aim of realizing the efficient operations of factories and logistics warehouses.
For more information, use the enquiry form below to contact the Research & Development Group, Hitachi, Ltd. Please make sure to include the title of the article.




