Mobility requirements in innovative smart cities will prompt improvements in new driverless metro systems characterized by full integration with infotainment and wireless communication systems. In recent years, several new driverless systems have been provided around the world, together with the conversion of traditional lines to more efficient driverless metro systems. With demand for transportation systems constantly growing, it is essential to respond with trains designed to support energy reduction targets, operational cost optimization, high performance, and minimization of the risk of human error. Demand for transportation capacity can change significantly depending on the requirements of different operators, and big fluctuations can be expected during peak hours. This makes more difficult the challenge of providing flexible and efficient trains capable of supporting new requirements without compromising safety and performance. Additionally, the ability to manage train configurations and headway automatically during 24-h non-stop operation so as to optimize operational and energy costs while still maintaining a high level of dependability and diagnosability will become a key technical advantage. Consequently, there is a growing need for up-to-date trains capable of supporting these features. This need underpins HRI’s design philosophy of providing modern driverless vehicles that can satisfy these challenging customer requirements.

Design Engineering Department, Napoli Branch Office, Hitachi Rail Italy S.p.A. He is currently the Head of Mass Transit Design & Traction Components Engineering.

Design Engineering Department, Napoli Branch Office, Hitachi Rail Italy S.p.A. He is currently working as a Train Systems Engineer.

Design Engineering Department, Pistoia Branch Office, Hitachi Rail Italy S.p.A. He is currently the Head of Carbody Engineering.

Design Engineering Department, Pistoia Branch Office, Hitachi Rail Italy S.p.A. He is currently the Head of Bogie Engineering.

Design Engineering Department, Napoli Branch Office, Hitachi Rail Italy S.p.A. He is currently the Head of Traction Converter Engineering.

Design Engineering Department, Pistoia Branch Office, Hitachi Rail Italy S.p.A. He is currently working as a Structural Safety Specialist.
IMPROVED energy efficiency for mass transit systems is a very important challenge for the future of the rail market. Reducing power consumption is an issue that not only has an impact on the environment, but is also influenced by the rising cost of energy, especially in Europe.
Optimization of operational costs, together with green technologies for energy saving and the integration of advanced infotainment and passenger information systems (PIS), will be the basis of new intermodal mobility in the near future for smart cities and will lead to greater expansion of driverless metro systems relative to conventional ones. Moreover, unattended train operation makes it possible to increase train frequency and service flexibility, up to 24-h non-stop operation, bringing significant economic benefits.
In fact, in addition to environmental issues and sustainable development in the construction of new transportation systems in urban and metropolitan areas, the driverless systems also offer greater operational advantages and opportunities for service cost reduction than traditional metros do.
Other major benefits include reductions in management and personnel costs, and these should be taken into account together with the potential for higher transit frequencies during peak hours with more flexible schedules. This flexibility, which is not possible with a standard metro system, can reduce energy consumption by optimizing acceleration/deceleration curves while also minimizing stationary time at terminal stations and enabling services to run according to tight timetables.
Based on its experience with driverless systems that dates back to its previous form as AnsaldoBreda S.p.A., Hitachi Rail Italy S.p.A. (HRI) has over the last 20 years developed a wide-ranging driverless vehicle platform with high-performance targets for flexibility, reliability, safety, and comfort, and also with advanced technological solutions for increased vehicle availability, maintainability, and dependability.
The overall system engineering approach and detailed control of the technologies used provide the basis for the new HRI modular driverless metro platform, which was conceived with an integrated mix of state-of-the-art and service-proven equipment and components that meet all the major market safety standards (including crashworthiness and fire/smoke).
The easily reconfigurable driverless vehicle platform is designed to lower life-cycle costs and guarantee high reliability and availability, based on versatility and flexibility in adapting to both market needs and operators' needs through the customization of the final product. The trains can be customized in terms of dimensions, internal and external layout configuration, performance, and transport capacity. This is the result of detailed design carried out by means of artist impressions, technical drawings, and realistic computer simulations, which are used to define all the styling and functional characteristics. Meanwhile, development times are shortened by using a portfolio of in-house components that serve as the main technological building blocks together with use of service-proven equipment from external vendors, all of which are tightly integrated by the control and supervision architecture provided by the train control and monitoring system (TCMS).
The driverless platform (see Fig. 1) can be used in configurations from two to six cars in length (aluminum alloy carshells with lengths ranging from 12.5 m to 18.5 m and widths ranging from 2.6 m to 3.0 m). These are available in conventional and articulated versions, with the installed traction and auxiliary power and the number of motorized and trailer bogies optimized to suit the traction and braking performance requirements and overall transport capacity.
As already noted, the driverless vehicle platform is based on service-proven technology modules that are integrated by both the TCMS and the automatic train control/communication-based train control (ATC/CBTC) system, which features a redundant configuration.
Features include the following:
Fig. 1—Driverless Platform.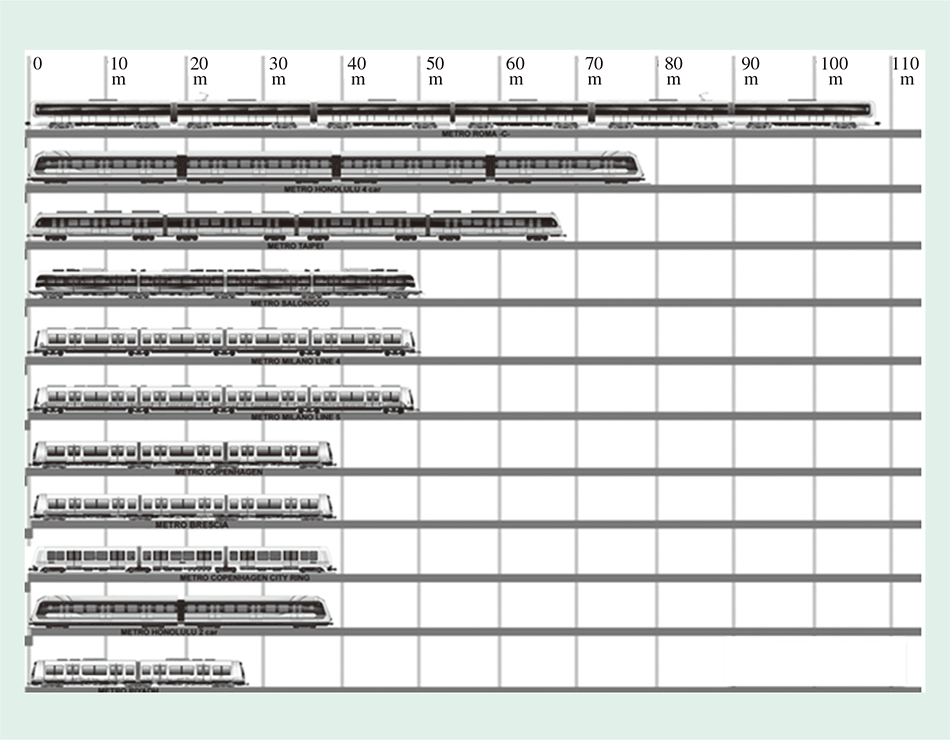 Conventional and articulated driverless vehicle configurations are available from two to six cars in length.
Conventional and articulated driverless vehicle configurations are available from two to six cars in length.
Fig. 2—Front Windscreen. The main characteristic of a driverless train is the absence of a driver cab, instead providing a front large windscreen for passengers.
The main characteristic of a driverless train is the absence of a driver cab, instead providing a front large windscreen for passengers.
The fully automatic driverless vehicle is based on an innovative design with a high level of functionality and comfort for passengers. The major difference from a traditional vehicle is the absence of the driver cab, which means cars can have a large front windscreen that provides passengers with panoramic views and full visibility of the track ahead (see Fig. 2).
The vehicle design fits perfectly with the urban architectural environment of modern cities and is designed around passengers, their comfort being the main objective. All vehicles are equipped with eco-friendly air-conditioning equipment and state-of-the-art infotainment systems. Because most equipment is installed underframe, there are no obstacles to passengers moving around inside the vehicles. The large windows and wide gangways that provide free passage between cars facilitate the uniform distribution of passengers in the train, increasing comfort and sense of safety.
This design solution also provides space for open areas that can be used for wheelchairs, strollers, and bicycles. The seats are fully cantilevered to the sidewalls (no floor supports), thereby allowing for easy cleaning and safety inspection. They can be assembled in various layouts according to specific customer requests.
Particular care has been taken to ensure easy maintenance, as well as easy accessibility and quick replacement of all equipment. Most materials are completely recyclable for easy disposal at the end of the vehicle's life.
In addition, all on-board systems are designed to reduce electromagnetic emissions and acoustic noise. In compliance with the latest standards, static magnetic fields, too, have been minimized to avoid any interference with personal medical systems (such as pacemakers).
Safety and security are key features of the HRI driverless vehicle technology. These include automatic control systems that help eliminate human error; the use of redundancy in the main on-board equipment to avoid any single point of failure; a hidden emergency driver desk that can be used to recover the train in the event of a major failure in the automation system; the use of closed circuit television (CCTV) for on-board video surveillance, including recording and transmission of images to the central control room; an emergency ground-to-train passenger communication system; and the provision of fire detection systems in both cars and technical areas. All of these are under the supervision of a fully integrated advanced diagnostic management system that is continuously connected to the control center for realtime monitoring and includes an on-board event recorder for safe data storage and backup.
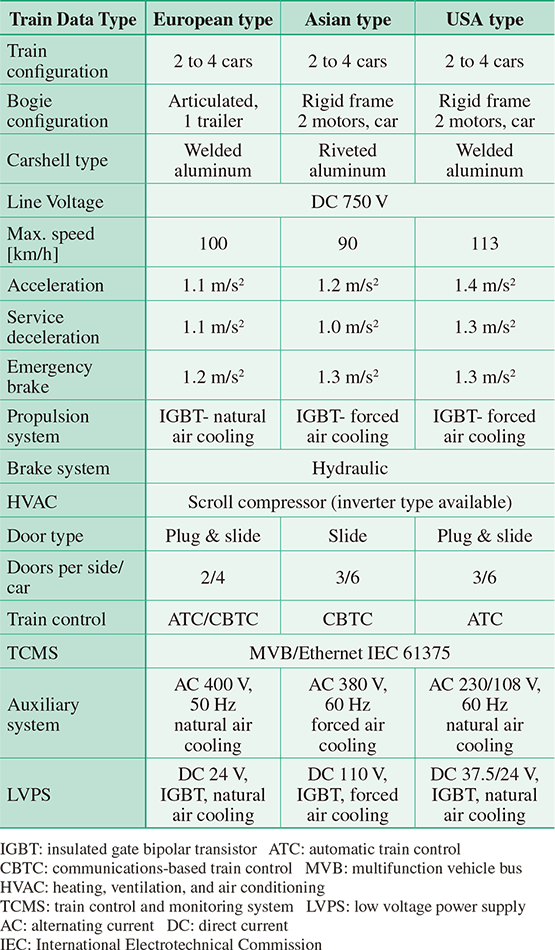
TABLE 1. Main Parameters of Driverless Platform
The table compares the main features and performance of different train typologies included in the platform portfolio.
Starting from the first Copenhagen Metro driverless metro that was designed at the end of the 1990s and has successfully been in service since 2002, the HRI driverless platform has undergone ongoing improvements in applications around the world. Vehicles for Metropolitana di Milano (Metro Milan) Lines 4 and 5, Thessaloniki Metropolitan Railway (Thessaloniki Metro) (4 cars), Brescia Metro (3 cars), and Princess Nourah Bint Abdulrahman University Automated People Mover (University for Women - Riyadh) (2 cars) were all built on the same driverless metro platform. They are characterized by light aluminum carbodies with articulated bogies and open gangways between cars, hydraulic brakes, and insulated-gate bipolar transistor (IGBT) traction inverters with a new improved natural air cooling system (aided by vehicle motion) and 750-V third rail collectors. The vehicles supplied to Taipei Circular Line (Taipei Metro) customized the light driverless platform for the Asian market. The four aluminum cars were riveted, had two bogies per car (for lighter axle weight), and were fully powered with 750-V third rail collectors.
The latest evolution of the platform is the new Copenhagen Metro Cityringen, which is expected to enter service at the end of 2018. The vehicle design has been improved to accommodate the new CBTC signalling system, allowing shorter headways and minimizing the need for wayside equipment.
The vehicles for Metro Roma Line C, which entered service at the end of 2014, were the first driverless heavy rail vehicles (HRVs) to be supplied by HRI and operate in a six-car configuration. The philosophy behind the design architecture was to incorporate driverless capabilities into the standard European six-car metro configuration (aluminum construction with open gangways and 1500-V pantograph power supply). The other main differences from the HRI light driverless train platform are the use of two bogies per car (four of the six cars are powered), a pneumatic brake system, and IGBT converters with forced air cooling that interface to ATC through a multifunction vehicle bus (MVB). This project demonstrates that the platform has the flexibility to adapt the driverless concept to market needs.
The new generation of this HRV train configuration is the Metro de Lima y Callao (Lima Metro) driverless train, which is currently undergoing commissioning testing at the Velim Test Ring in the Czech Republic. This metro combines the physical architecture of HRI's new conventional European metro platform (the Leonardo rolling stock for Azienda Trasporti Milanesi (ATM) Milano lines 1 and 2) with the latest driverless CBTC technology. It has a six-car configuration with aluminum construction; efficient heat pipe IGBT inverters; a heating, ventilation, and air conditioning (HVAC) system; and 1500-V pantograph.
Another example of the ability to adapt the driverless platform design to different market requirements has been the Honolulu Rail Transit (Honolulu Metro) project, with operation expected to start at the end of 2018. The train has the standard European metro architecture, featuring aluminum construction, four-car configuration with open gangways, and eight bogies, but is also designed to satisfy requirements and standards specific to North America. It is full motorized and uses 750-V third rail collectors with the cars isolated from each other.
Table 1 summarizes the main characteristics of HRI driverless vehicles in the three main applications of the metro platform: the European type (Copenhagen), Asian type (Taipei), and USA type (Honolulu).
Fig. 3—V-model.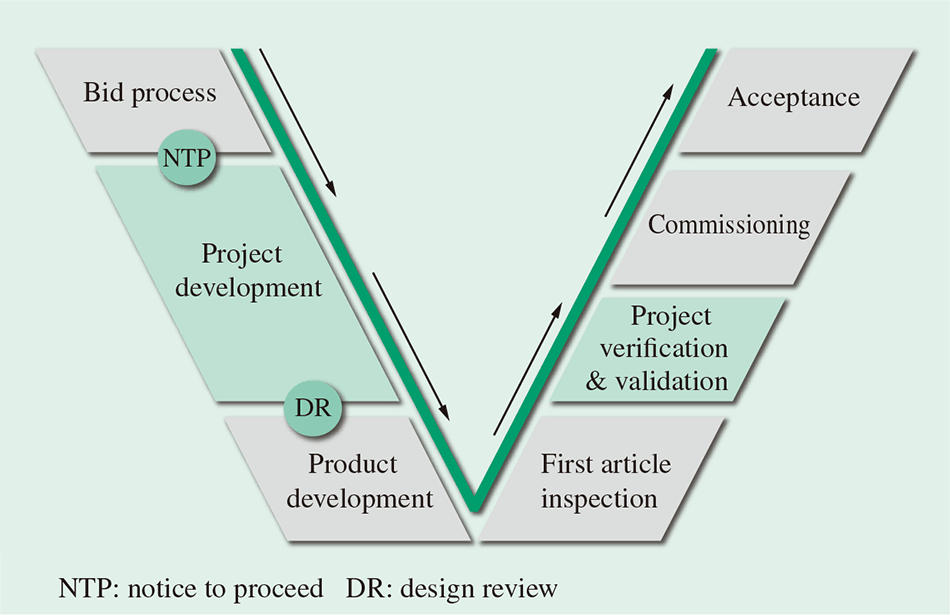 The V-model is a detailed representation of the design lifecycle of complex systems from requirements to acceptance.
The V-model is a detailed representation of the design lifecycle of complex systems from requirements to acceptance.
The HRI design approach is based on the V-model (see Fig. 3) and is characterized by the appropriate use of requirements management and development processes supported by specific tools. This approach ensures that the design incorporates all details and covers all customer requirements, including the correct management of changes at the platform level down to the testing, commissioning, and acceptance phases.
The integrated architecture of systems and subsystems has the following features:
Fig. 4 shows a typical TCMS architecture for a driverless train.
Realtime propulsion and brake control signals are exchanged through a standard MVB redundant network [that complies with International Electrotechnical Commission (IEC) 61375]. The design allows no single point of failure to affect normal train operation.
The diagnostic network is based on Ethernet communication (IEC 61375-2-5) with a ring architecture to avoid any single point of failure affecting diagnostics, PIS, or CCTV systems. The latest train realtime data protocols are used. Passenger Wi-Fi* connections are also provided to allow people to use the Internet in tunnels.
This network is mainly used to interface subsystem control units for things like the doors, HVAC, and fire detection. Universal Ethernet ports can also be installed in the cab (or anywhere else inside the train) to provide a central point from which a portable test unit can connect remotely to the individual controls and download log files or update software (making troubleshooting easier and shortening the time required for maintenance).
Fig. 4—TCMS Architecture.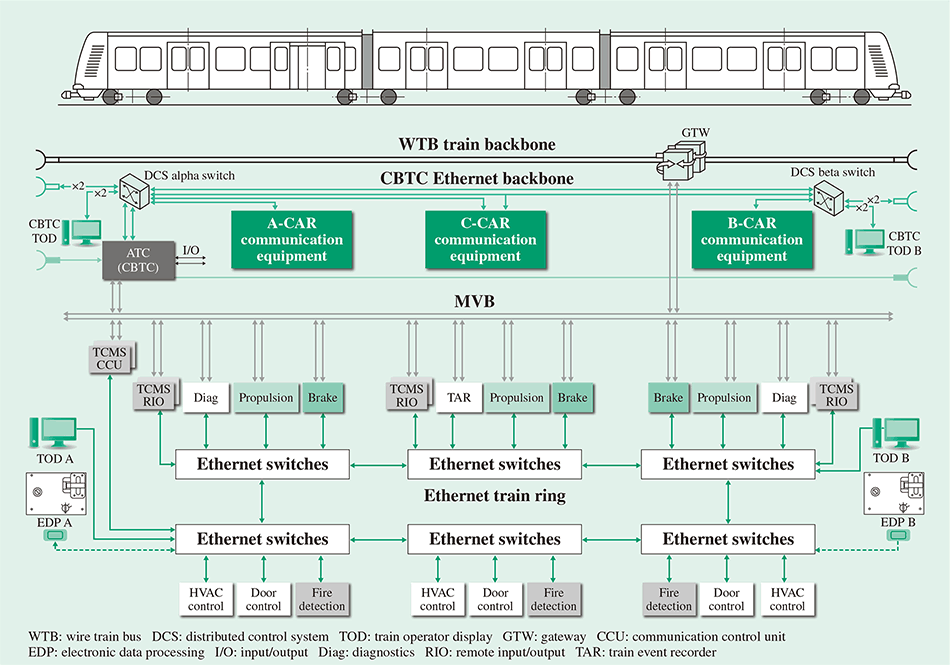 This example shows a standard TCMS architecture solution for the integration of all subsystems (including on-board signalling) through the MVB, WTB, and Ethernet network
This example shows a standard TCMS architecture solution for the integration of all subsystems (including on-board signalling) through the MVB, WTB, and Ethernet network
Fig. 5—TOD Layout View. The TOD touchscreen is installed in the emergency driver desk. The layout for diagnostics and alarms is easy to customize to satisfy customer requests.
The TOD touchscreen is installed in the emergency driver desk. The layout for diagnostics and alarms is easy to customize to satisfy customer requests.
Fig. 6—Common Inter-car HV Link. A typical traction architecture has a common inter-car HV link that ensures a high level of redundancy.
A typical traction architecture has a common inter-car HV link that ensures a high level of redundancy.
A very compact train operator display (TOD) can be installed, if required, on the emergency driver panel for use by the driver during emergency manual operation. The TOD layout follows the standard HRI platform approach (see Fig. 5), with a user-friendly design that provides train diagnostics, alarms, and speed information. The display layout can be customized as needed to satisfy regulatory or client requirements.
Hardwired trainlines are provided for safety-related signals, fed by dedicated direct current (DC)/DC power supplies (in order to avoid any single point of failure affecting safety), ensuring that these signals can be detected directly and reliably by the ATC system.
The vehicle TCMS network is directly interfaced to the communication systems, allowing realtime train monitoring from the central control room.
The same architecture is used for interfacing the TCMS to the signalling systems in all configurations (ATC or CBTC), allowing the use of standard designs for vehicle systems and subsystems that are independent from the specific signalling system adopted on board. This also reduces the time for testing and commissioning.
When operating with multiple units, MVB and wire train bus gateways can be installed to allow propulsion and brake communication between units during operation.
By adopting the same control and blending approach for traction and braking systems, the propulsion architecture can be fully customized to customer requests, allowing cars either to share a common HV connection or to be supplied power independently. It also ensures that standard service-proven components can be reused.
These two different propulsion architectures involve either using a separate HV link for each car in the train to isolate the cars from each other, or using a common HV link to provide a high level of redundancy (see Fig. 6). In both cases, the same HRI propulsion equipment is used.
Fig. 7—Traction Converter Layout. The aluminum inverter heat sinks in the train underfloor are cooled by air flow due to train movement.
The aluminum inverter heat sinks in the train underfloor are cooled by air flow due to train movement.
HRI has developed a natural air cooling system (no motor fan) assisted by vehicle motion, with benefits in terms of comfort, noise, efficiency, reliability, maintainability, and cost. The system employs a standard aluminum heat sink, the position of which is optimized with respect to the train underfloor.
This works by taking advantage of the air flow due to the train's speed to remove the large amount of heat generated during vehicle motion, while relying on natural air cooling alone to deal with the smaller amount of heat generated when at standstill. The factors to be considered in the cooling system design are: (1) peak losses generated during acceleration and braking, which do not correspond to the maximum train speed; (2) very low losses when the train is coasting at the maximum speed; and (3) the air speed over the fins not being directly linked to the train speed because the underfloor air flow is far from being laminar.
A model of variable thermal impedance was validated in a wind tunnel test room and the mechanical arrangement of converters and other underfloor equipment optimized to maximize the thermal performance of the system (see Fig. 7). Using this cooling approach on an HRI metro train can guarantee an IGBT junction thermal ripple of less than 30°C and a maximum absolute junction temperature of less than 110°C in operating mode. This is a cheaper alternative to the heat pipe solution.
Fig. 8—Composite Crash Device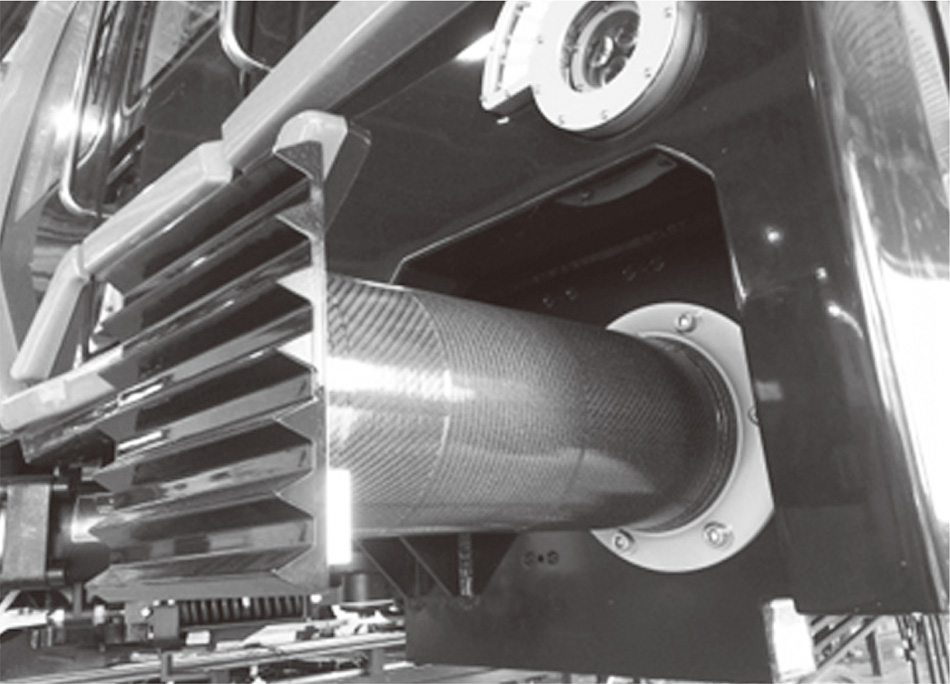 This new composite solution for crash boxes is installed in the Leonardo trains for Metro Milan Lines 1 and 2.
This new composite solution for crash boxes is installed in the Leonardo trains for Metro Milan Lines 1 and 2.
Crashworthiness design has become a mandatory requirement for all new projects. In metro vehicle applications, which do not tend to have sloped noses with room for crash devices, and for which vehicle weight targets are very demanding, the installation of sacrificial components imposes constraints on the vehicle layout.
For these reasons, HRI decided in 2013 to start developing a new generation of innovative crash boxes made of composite materials. Development of the new crash boxes proved to be a very difficult challenge, because they had to comply with various standards (EN15227, EN45545, and DIN6701) while also achieving better efficiency than current state-of-the-art steel crash boxes together with lower weight and comparable cost.
The design work started with the development of a new concept for the crash box shape that took maximum advantage of the composite material's properties. Several qualification tests were also conducted on the raw materials to determine their mechanical and fire/smoke properties. A highly accurate finite-element method model (LS-Dyna solver) with a very complex material chart was also developed and actual-scale crash testing was successfully conducted for EN15227 homologation.
The main features of the new generation of composite crash boxes are as follows:
This new composite solution has been installed in the Leonardo trains (see Fig. 8), Lima Metro, and Honolulu Metro, and an improved version is used on the Metro Milan Line 4 and Thessaloniki Metro.
Fig. 9—Copenhagen Metro Motor Bogie. This motor bogie with an articulated frame is used in all driverless articulated vehicle configurations.
This motor bogie with an articulated frame is used in all driverless articulated vehicle configurations.
Fig. 10—Taipei Metro Motor Bogie.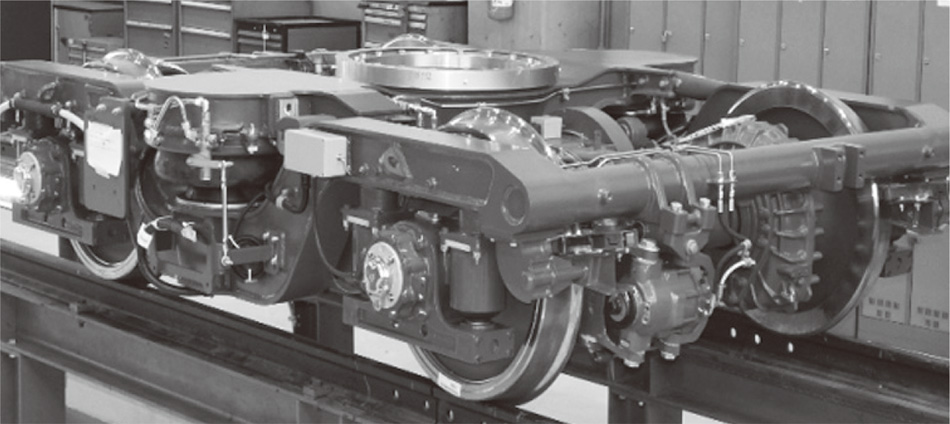 This motor bogie with a rigid frame is used on the Taipei Metro driverless vehicle. It features reduced axle weight and the ability to travel around tight curves.
This motor bogie with a rigid frame is used on the Taipei Metro driverless vehicle. It features reduced axle weight and the ability to travel around tight curves.
TABLE 2. Bogie Parameters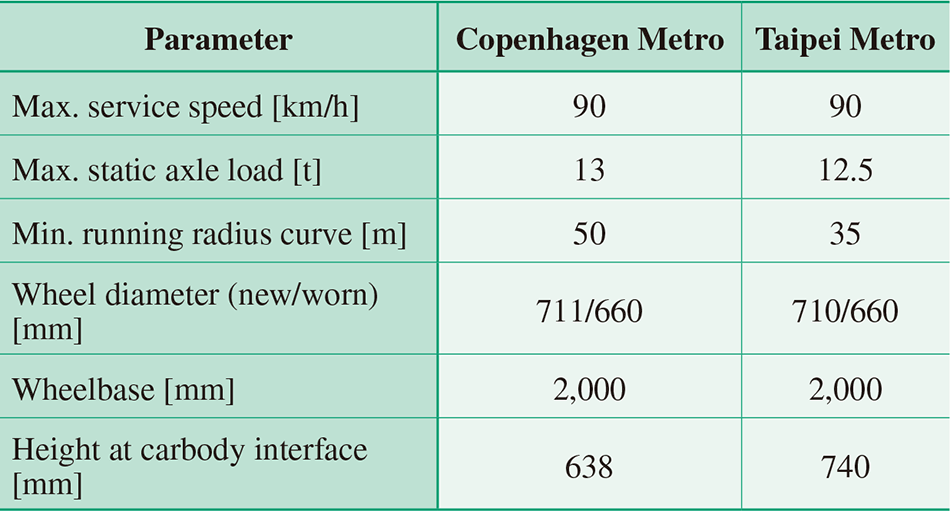 The table lists the main characteristics for two different bogie designs: one articulated and the other with a rigid frame.
The table lists the main characteristics for two different bogie designs: one articulated and the other with a rigid frame.
The bogies for the standard light driverless metros, starting from the first Copenhagen Metro, have been strictly derived from those used in the San Francisco street cars that were the first articulated bogies in HRI's history. This bogie (see Fig. 9) features a very low height at the interface with the carbody and a compact design that takes account of the bolster beam over the secondary suspension that supports the slewing ring. These characteristics are essential for the installation of the bogie on an articulated vehicle like the light driverless platform.
The bogie frame is articulated, and this is achieved by two symmetrical half frames made of welded steel plates and forged parts that are connected by two spherical rigid joints oriented diagonally. The bogie frame keeps the side frame at a very low level within the area of the primary suspension, which is made from very compact metal-rubber bushes. While the stiffness of the bushes is not especially low, the combination with the frame articulation, optimized air springs, and resilient wheels keep the bogie within the running safety limits, maintaining passenger comfort and keeping noise levels low even when there are irregularities in the track.
The use of a slewing ring for the connection with the carbody means the bogie can travel safely and smoothly around very sharp curves (< 50 m radius in the workshop). The traction motor is suspended from the bogie frame on the rear side and from the gear unit on the other side. The gear unit is press fitted onto the axle. The brake unit is installed on the gearbox. An external link between the bolster beam and the bogie frame provides the traction connection.
The bogie used in Taipei Metro provides an example of how the design has evolved (see Fig. 10). For this application, the bogie was designed with a rigid frame and with a more traditional design architecture since more space was available in the underframe. The bolster beam and the slewing ring have been kept due to the requirement for the rolling stock to operate on tight curves (Taipei has curves with radius < 35 m), while the primary suspension has two conical springs per axle box. The motor is fully suspended from the bogie frame while the gear box unit is not suspended at all, with the only connection between the two being provided by a toothed gear coupling. The brake calipers are fixed to the bogie frame and the wheels are of a mono-block type, with scope for installing a noise damping device. Table 2 lists the main characteristics of these bogies.
HRI is strongly committed to the continuous improvement of its mass transit vehicle platform in order to be ready to deliver the most flexible, versatile, and up-to-date solutions for future mobility requirements and the new needs of the fast growing driverless metro systems market.
System integration design of complex architectures is the key basis of the modular and easily reconfigurable HRI driverless vehicle platform, which is designed to lower life-cycle costs and guarantee high dependability. The trains can be tailored according to customers' needs in terms of dimensions, layout, performance, and transport capacity.
