Hitachi’s Nuclear Power Business
In response to the accident at Fukushima Daiichi Nuclear Power Plant following the Great East Japan Earthquake, Hitachi has been developing various equipment needed for the surveys being undertaken in preparation for the decontamination of the power plant, environmental remediation, and fuel debris removal. This article describes the ASTACO-SoRa dual-arm heavy machinery-type robot, a flexible robot arm able to operate under high levels of radiation, the PMORPH shape-changing robot for surveying the interior of the primary containment vessel, the Gengo-ROV and Tri-diver submersible ROVs for surveying inside the torus room, and boat-type submersible access devices for surveying submerged regions of the containment vessel. Details of their deployment to date are also provided. The article also looks at the next generation of robotics planned for deployment, specifically techniques for supporting the work of robots able to operate under high levels of radiation and the use of drones for surveying and monitoring.




Because the decommissioning of the Fukushima Daiichi Nuclear Power Plant involves working under high levels of radiation, it requires equipment such as remotely operated survey robots and working robots for performing decontamination and debris removal. Hitachi has been involved in developing such robots and deploying them at the site.
This article describes progress to date on the development of working robots, survey robots and the next generation of robotics as well as their use in practice.
While working robots are generally used for tasks like debris removal and decontamination, the decommissioning of Fukushima Daiichi Nuclear Power Plant requires robots able to operate under high levels of radiation. This section describes a small dual-arm robot suitable for heavy-duty work and a flexible robot arm able to remove fuel debris under high levels of radiation.
Hitachi has been developing and deploying the ASTACO-SoRa as a small dual-arm, heavy machinery-type robot suited to nuclear disaster applications in response to the need for remotely operated robots(1). Figure 1 shows the robot and Figure 2 shows the remote operation panel. Equipped with a compact body (980 mm wide) and two arms, the robot is able to work inside the building with a high degree of freedom. The arms can reach a height of approximately 2.5 m and are able to lift up to 150 kg each (300 kg when both arms are used together). The ability of the robot to replace the attachments on the ends of its arms means it is able to perform a wide variety of work. These include attachments for gripping, cutting, and rotating as well as a boom arm with attached camera. The robot is operated wirelessly from a remote operation panel with five monitor screens available for viewing that can switch between the robot’s six camera feeds. Furthermore, each of these six cameras is fitted with light-emitting diode (LED) lighting to facilitate work such as debris removal in the dark interior of the reactor building. The development of the ASTACO-SoRa has made possible the removal of concrete rubble and other debris from inside the reactor buildings at Fukushima Daiichi Nuclear Power Plant despite the high radiation levels.
Fig. 1—ASTACO-SoRa Dual-arm Heavy Machinery-type Robot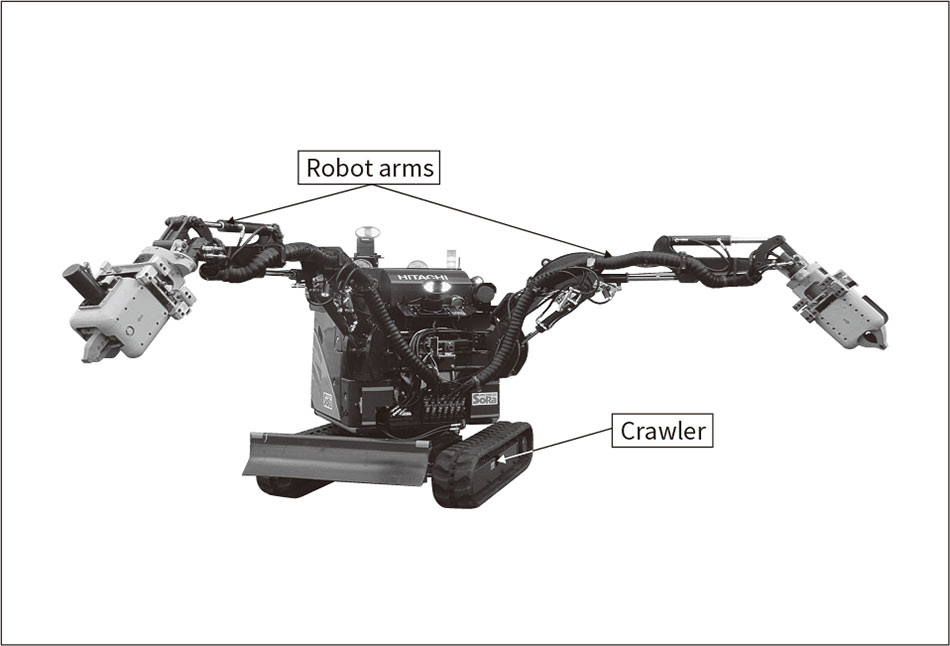 The robot is designed for heavy-duty work inside the building, with the tools attached to the ends of the robot arms able to be swapped remotely.
The robot is designed for heavy-duty work inside the building, with the tools attached to the ends of the robot arms able to be swapped remotely.
Fig. 2—Remote Operation Panel for ASTACO-SoRa Dual-arm Heavy Machinery-type Robot The crawlers and arms are operated by joysticks while information from the robot’s cameras and sensors is displayed in real time.
The crawlers and arms are operated by joysticks while information from the robot’s cameras and sensors is displayed in real time.
Among the issues with using conventional remotely operated robots to remove fuel debris are their short operating life, a result of damage to their electronics by high levels of radiation, and the need for a means of avoiding collisions in locations with poor visibility. To overcome these, Hitachi developed a flexible robot arm that, in place of electric motors, uses a combination of pressurized water cylinders and clockwork mechanisms made up of springs or other forms of elastic energy storage. The arm has a flexible structure that is not damaged by collisions with the objects being worked on or other parts of the surroundings, and can be controlled without using radiation-susceptible sensors(2).
A variety of configurations are possible by combining the flexible elements with existing mechanical components. Figure 3 shows one typical example (a flexible four-legged robot arm) operating in a mockup of the primary containment vessel (PCV). The robot is able to move where needed by gripping the overhead beam and its ability to swap over the tools on the end of its arm allows work to proceed efficiently.
Similarly, Figure 4 shows a mock-up test in which a flexible dual-arm robot removes debris such as material that has fallen down into the cylindrical pedestal that supports the reactor pressure vessel. The dual-arm configuration can hold material in both arms while cutting, avoiding the problem of offcut material falling off. These features make the flexible robot suitable for applications in fuel debris removal under a variety of different conditions.
Fig. 3—Flexible Four-legged Robot Arm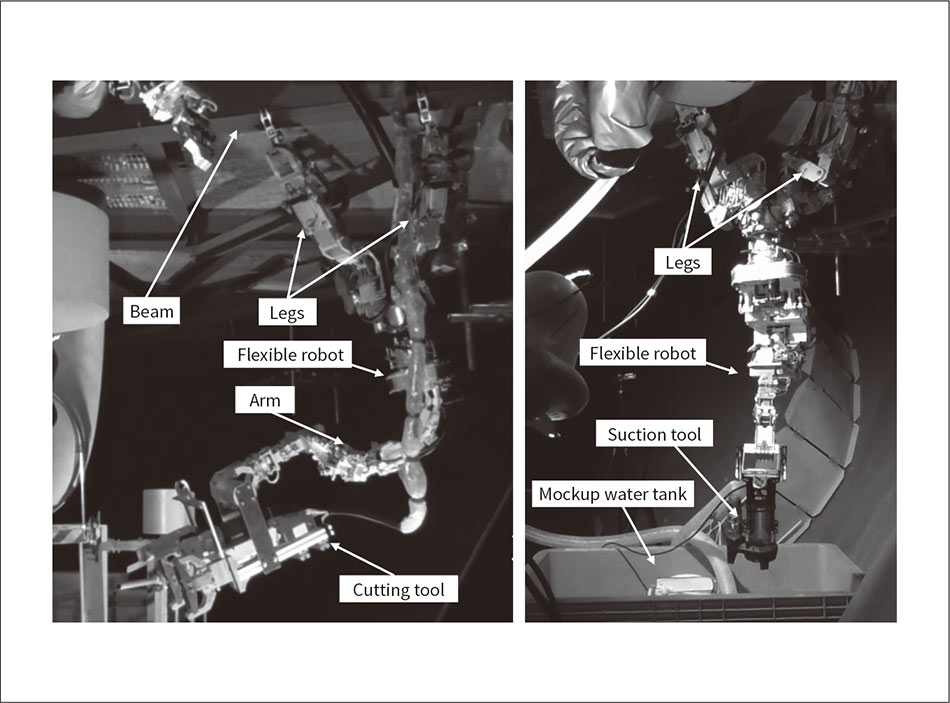 The robot arm is able to work in any location by gripping onto grating support beams by the four legs it uses for locomotion. The robot is able to perform a wide variety of tasks by swapping the tools attached to the end of its arm as required. The image on the left shows a cutting tool being used to remove an obstruction. The image on the right shows the arm installing a suction pump.
The robot arm is able to work in any location by gripping onto grating support beams by the four legs it uses for locomotion. The robot is able to perform a wide variety of tasks by swapping the tools attached to the end of its arm as required. The image on the left shows a cutting tool being used to remove an obstruction. The image on the right shows the arm installing a suction pump.
Fig. 4—Flexible Dual-arm Robot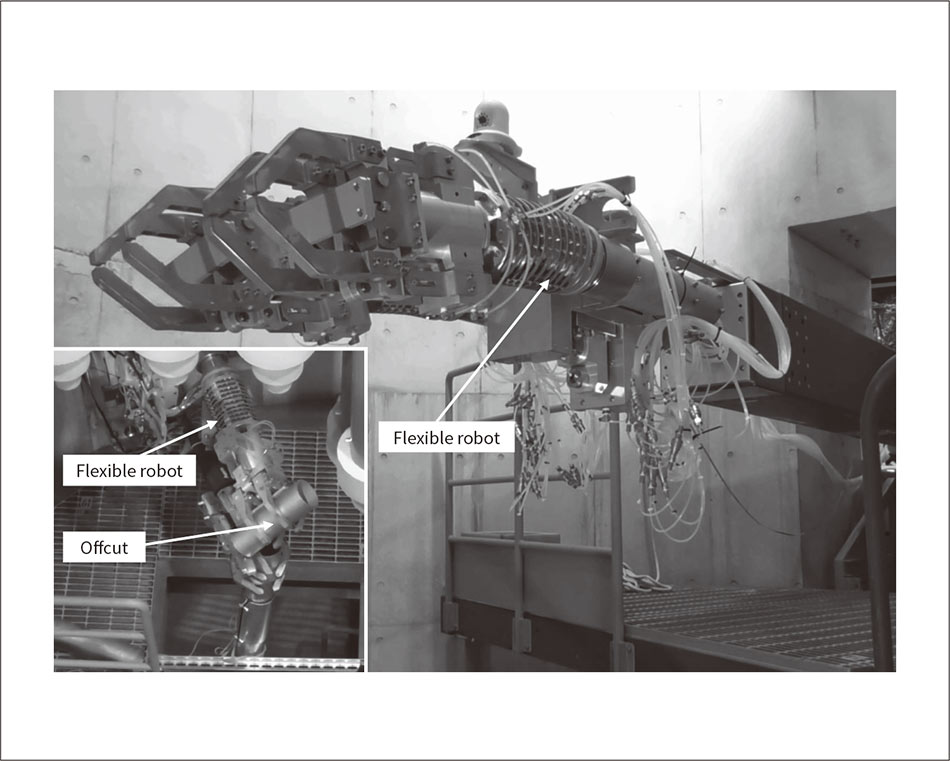 This robot is equipped with two flexible arms. The inset on the bottom-left shows how the robot can cut an object while holding it by both arms. In this way, demolition work can proceed by removing one of the held pieces after each cut.
This robot is equipped with two flexible arms. The inset on the bottom-left shows how the robot can cut an object while holding it by both arms. In this way, demolition work can proceed by removing one of the held pieces after each cut.
Figure 5 shows the Hitachi PMORPH1 shape-changing robot used in the survey of the level 1 grating in the PCV of Unit 1 at the Fukushima Daiichi Nuclear Power Plant conducted in April 2015 (B1 survey)(3). PMORPH1 has a survey camera mounted between its two crawlers. The U-shaped camera faces forward and has an up and down tilt mechanism to enable visual inspection of the interior structures of the PCV. It is also fitted with a radiation meter and temperature sensor to assess conditions on the grating. Along with information on the distribution of radiation and temperature, the survey conducted using PMORPH1 also found that no major damage had occurred to structural components(4).
Figure 6 shows the PMORPH2 used for the Unit 1 PCV basement survey (B2 survey) conducted in March 2017. In place of the camera on the PMORPH1, the PMORPH2 was fitted with a winch for lowering a sensor unit into the basement. The sensor unit contained a camera and radiation meter. The survey was able to determine the extent of fallen material and sediment in the basement and found that radiation levels increased closer to the floor(5).
Fig. 5—PMORPH1 Shape-changing Robot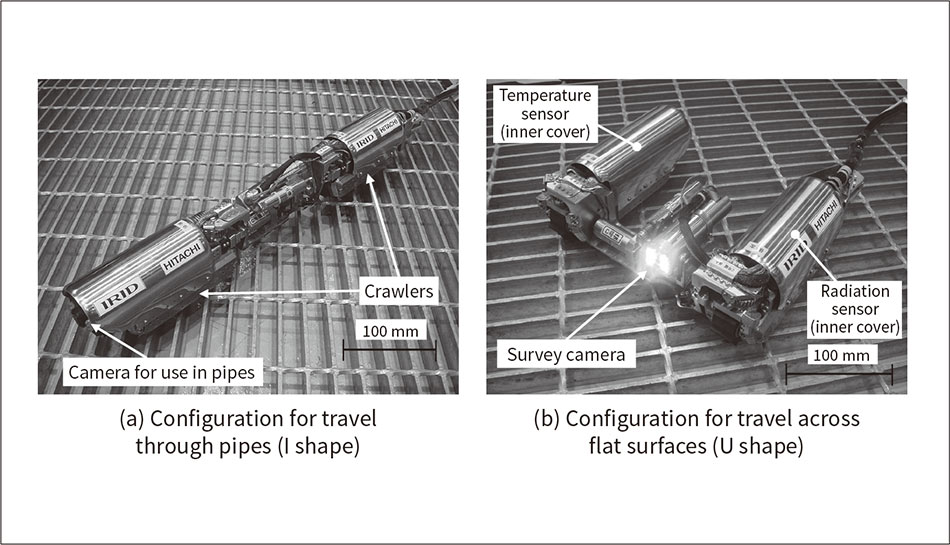 The robot is able to switch between two configurations for travel through pipes and across flat surfaces respectively, thereby providing reliable ways for it to travel under different conditions. Image (a) shows the configuration for travel through pipes and image (b) shows the configuration for conducting surveys by traveling over gratings.
The robot is able to switch between two configurations for travel through pipes and across flat surfaces respectively, thereby providing reliable ways for it to travel under different conditions. Image (a) shows the configuration for travel through pipes and image (b) shows the configuration for conducting surveys by traveling over gratings.
Fig. 6—PMORPH2 Shape-changing Robot The survey scope was expanded by fitting a winch equipped with a sensor unit to the moving mechanism of the PMORPH1.
The survey scope was expanded by fitting a winch equipped with a sensor unit to the moving mechanism of the PMORPH1.
Hitachi developed the Gengo-ROV submersible remotely operated vehicle (ROV) to provide a means of identifying leaks through holes in submerged walls in the torus room of the reactor building and to provide access to these. The ROV has been used to make visual inspections(6). Figure 7 shows the robot. The Gengo-ROV is equipped with five thrusters (two forward/reverse, one vertical, and two lateral), and can view objects underwater through fore and aft cameras able to pan, tilt, and zoom. A survey was also conducted of submerged walls in the torus room using the Tri-diver submersible ROV that has traveling function. Figure 8 shows the robot. The Tri-diver is fitted with crawlers, four thrusters for vertical movement, and two for lateral movement. The ROV’s sensors include ultrasound sonar as well as its underwater camera, and it is designed to detect currents, something that is difficult to achieve by optical means. In on-site use, the Tri-diver successfully identified the shape of holes from a distance of 3 m.
Fig. 7—Gengo-ROV Submersible ROV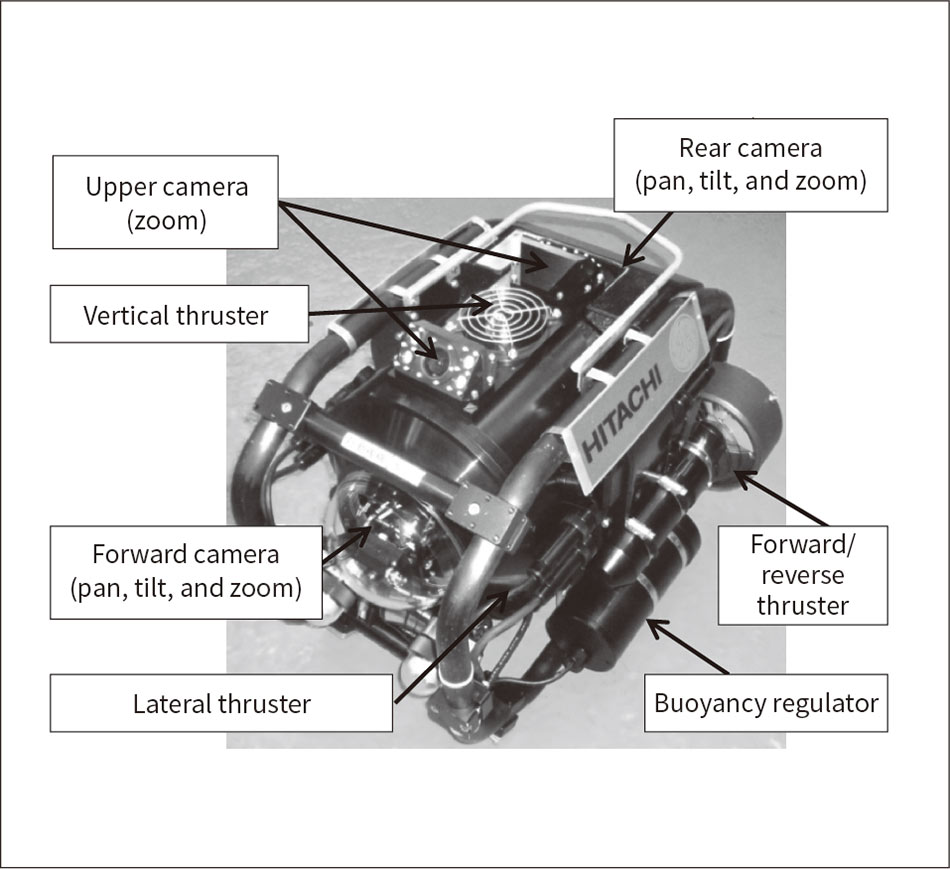 The remotely operated vehicle (ROV) has multiple propulsion units (thrusters) to enable three-dimensional movement underwater. The robot can be used on its own to perform visual inspections using its camera or to support the movement and work of other robots.
The remotely operated vehicle (ROV) has multiple propulsion units (thrusters) to enable three-dimensional movement underwater. The robot can be used on its own to perform visual inspections using its camera or to support the movement and work of other robots.
Fig. 8—Tri-diver Submersible ROV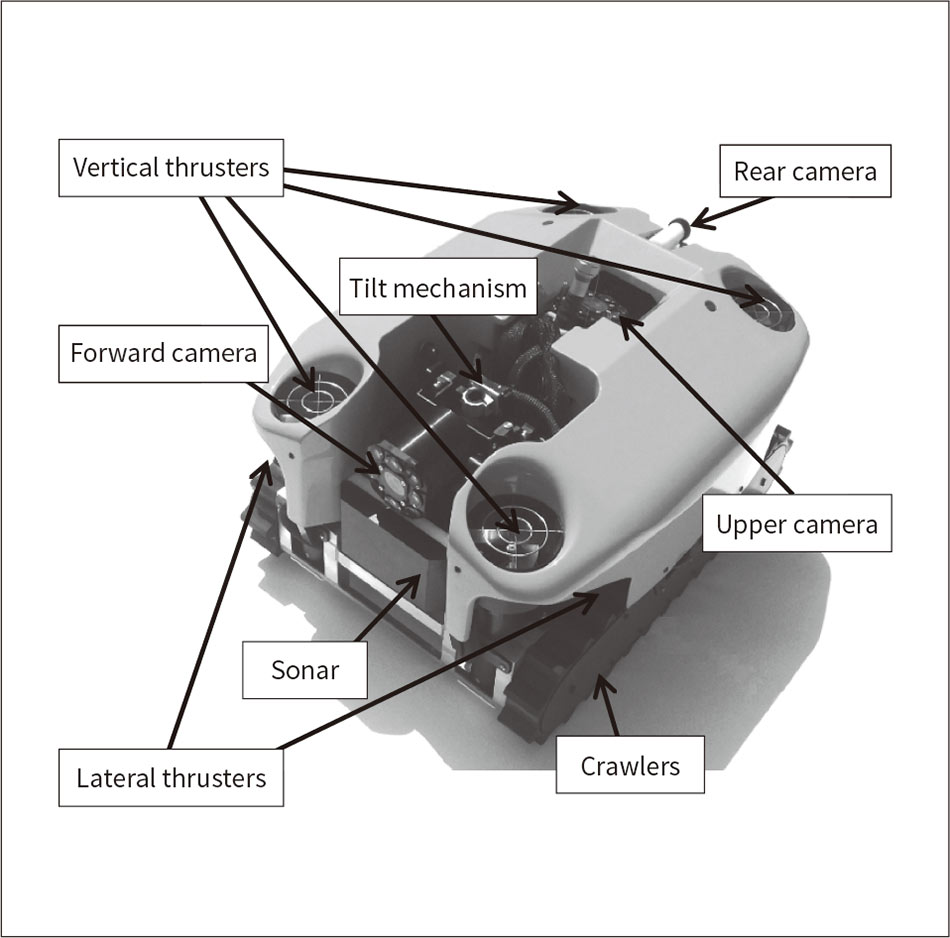 The ROV is equipped with crawlers and thrusters that allow it both to swim and to move along the bottom or across walls.
The ROV is equipped with crawlers and thrusters that allow it both to swim and to move along the bottom or across walls.
Fig. 9—Boat-type Submersible Access Device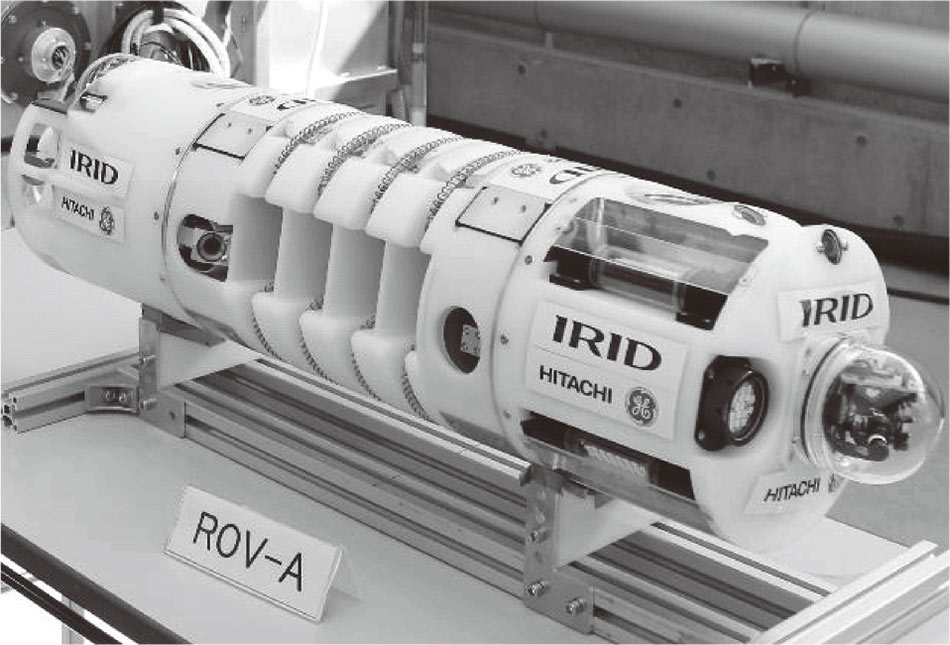 Hitachi has developed six boat-type submersible access devices to perform different functions. The photograph shows a type that guides the boat cables by attaching guide rings to metal parts underwater. Other boats have measurement functions for things like radiation distribution or the topography of the bottom.
Hitachi has developed six boat-type submersible access devices to perform different functions. The photograph shows a type that guides the boat cables by attaching guide rings to metal parts underwater. Other boats have measurement functions for things like radiation distribution or the topography of the bottom.
Devices have been developed and deployed to suit the various survey locations and objectives in the lower parts of the PCV or the basement of the reactor building that have been inundated by fuel cooling water or groundwater. These underwater robots include ROVs that are suitable for conducting surveys along with situation assessment. Accordingly, Hitachi has developed boat-type submersible access devices for surveying the exterior of the pedestal in the PCV basement(7). The six newly developed ROVs include five boat-type submersible access devices and one small boat. The boat shown in Figure 9 has the ability to magnetically attach guide rings to underwater structures so as to prevent the boat’s cables from getting tangled in power plant equipment. Hitachi has also developed four survey boats fitted with the sensors needed for their respective tasks of three-dimensional (3D) sediment mapping, sediment depth measurement, neutron flux measurement, and sediment sampling, and also a small boat that provides a wide field of view.
Fig. 10—Example Configuration of Operation Support System for Sensor-less Robots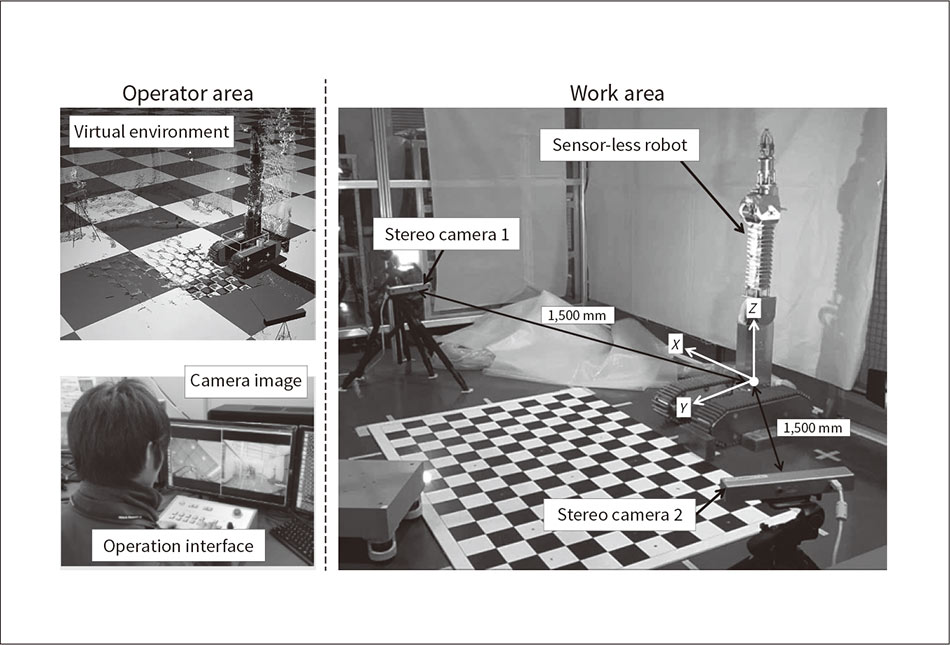 While this example involves attaching two stereo cameras in the surrounding area, the same support functions can also be provided by cameras attached to a mobile robot or larger numbers of stereo cameras.
While this example involves attaching two stereo cameras in the surrounding area, the same support functions can also be provided by cameras attached to a mobile robot or larger numbers of stereo cameras.
Operators are unable to watch the work robots they control from nearby, instead needing to use remote operation from a low-radiation location away from the high-radiation work site. This creates a need for systems to support the real-time operation and monitoring of work robots. Unfortunately, a lack of resilience to radiation makes it difficult to deploy conventional remote operation systems that monitor robots by attaching sensors that detect their orientation.
In response, Hitachi has developed a remote operation system that, instead of attaching sensors to the body of the work robot, operates and monitors the robot based on information from separately located sensors(8). Figure 10 shows an example configuration for the new remote operation support system. The system involves locating a sensor-less robot and separate stereo cameras in the work area and using an operator area controller to determine the state of the robot from the stereo camera images. This supports operations such as access to the work location and avoiding collisions with nearby obstacles by displaying the results in a virtual environment that provides the operator with a sense of the three-dimensional (3D) layout and surroundings that they could not get from camera images alone.
Fig. 11—Prototype Drone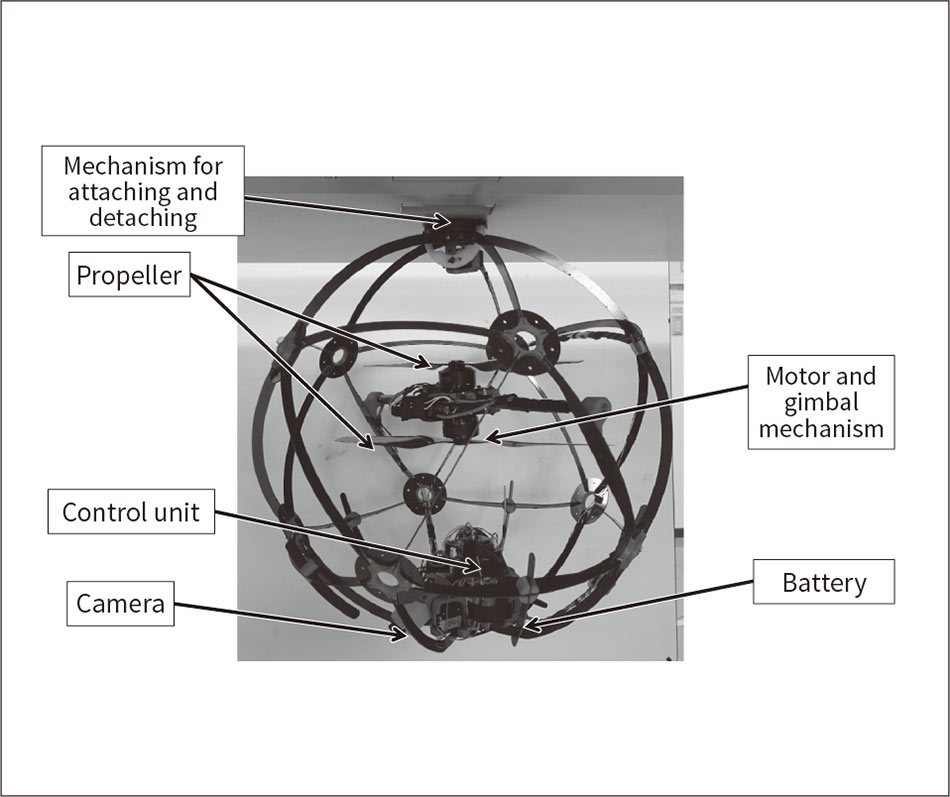 Contra-rotating propellers are used for propulsion, while attitude control is achieved by adjusting the propellers’ pitch and roll. Directional control is achieved by controlling the sum of the opposite torques from the upper and lower propellers, which is done by altering their speeds.
Contra-rotating propellers are used for propulsion, while attitude control is achieved by adjusting the propellers’ pitch and roll. Directional control is achieved by controlling the sum of the opposite torques from the upper and lower propellers, which is done by altering their speeds.
Hitachi has developed a small drone for monitoring work robots and surveying locations that crawler and other ground-traveling robots find difficult to traverse. These drones are able to fly inside confined indoor spaces, being equipped with spherical shells that permit collisions with the surroundings(9). Figure 11 shows a photograph. The new drone has a long operating time, with a mechanism for attaching to and releasing from steel structures and the ability to conserve power by hovering. The drone also has a center of gravity located below the center of the sphere. This means that, however it lands, it will naturally return to an orientation from which it can take off again. Testing of a prototype showed that the drone is able to attach to and release from ceilings and that it can attach itself to the building structure to provide views of the surroundings and acquire images over a wide area, demonstrating its suitability for use as a mobile camera that can provide a view into blind spots during remote operation.
This article has described various remotely operated robots developed by Hitachi for the decommissioning of Fukushima Daiichi Nuclear Power Plant as well as next-generation robotic technologies. Hitachi believes that these robots have helped it make a contribution to the progress of decommissioning. Hitachi plans to continue developing technology for the long-term task of decommissioning.
The equipment described in this article was developed using Hitachi robotics technology. The Gengo-ROV and Tri-diver submersible ROVs, PMORPH shape-changing robot for surveying the interior of the primary containment vessel, and the boat-type submersible access devices were developed with funding from sources that included the Agency of Natural Resources and Energy’s FY2012 grants for the development of technologies for dealing with accidents at power plant nuclear reactors and other such facilities, the FY2013 grants for the Technology Development Project of Decommissioning and Safety Technology and so on, and the FY2013 to FY2018 supplementary budgets for the Project of Decommissioning and Contaminated Water Management. The flexible dual-arm robot for working in the pedestal was developed as a project of the International Research Institute for Nuclear Decommissioning funded by the FY2016 supplementary budget for the Project of Decommissioning and Contaminated Water Management. The development of the ASTACO-SoRa dual-arm heavy machinery-type robot utilized technical know-how from the FY2006 to FY2010 Project for Strategic Development of Advanced Robotics Elemental Technologies commissioned by the New Energy and Industrial Technology Development Organization (NEDO). The authors would like to express their deep gratitude to everyone involved.
