7 July 2021

Yuto Imanishi
Research & Development Group, Hitachi, Ltd.

Yoichi Iihoshi
Research & Development Group, Hitachi, Ltd.

Yuki Okuda
Technology Development Division, Hitachi Astemo, Ltd.

Takashi Okada
Technology Development Division, Hitachi Astemo, Ltd.
With the recent advances in artificial intelligence and controller technologies, progressive control algorithms to make cars smarter are being introduced in the automotive field. Researchers have been exploring the applicability of optimization-based algorithms to several automotive applications, such as advanced driver-assistance systems (ADAS) and autonomous driving. These approaches have great potential for improving efficiency, comfort, and safety, since vehicle operation is optimized in consideration of future events. Previous research has investigated various types of events, especially deterministic events such as road gradient, road curvature, speed limit, and traffic signal, as these come with promising solutions such as digital road maps and Intelligent Transportation Systems (ITS) infrastructure. On the other hand, predicting surrounding vehicle behavior, which has a significant effect on vehicle control strategy, is still challenging due to its uncertainty.
One existing method for addressing this issue is based on a behavioral model based on background knowledge of vehicle behavior. For example, a gas pedal is usually operated to follow a speed limit, and deceleration tends to occur at intersections. By detecting these behavioral factors, the model can predict future behavior more accurately. However, it’s extremely difficult to build a universal model because vehicle behavior is affected by countless different behavioral factors that change from region to region. Thus, a model that works well in one place won’t necessarily work well in another place.
To address this challenge, we developed a method that predicts vehicle behavior intelligently without any pre-trained models by directly utilizing driving data shared among connected vehicles. Figure 1 shows an example of reference data on a certain route, where black dots represent data points shared by multiple vehicles. As we can see, the vehicle behavior strongly depends on the location. This insight forms the basis of our design concept.
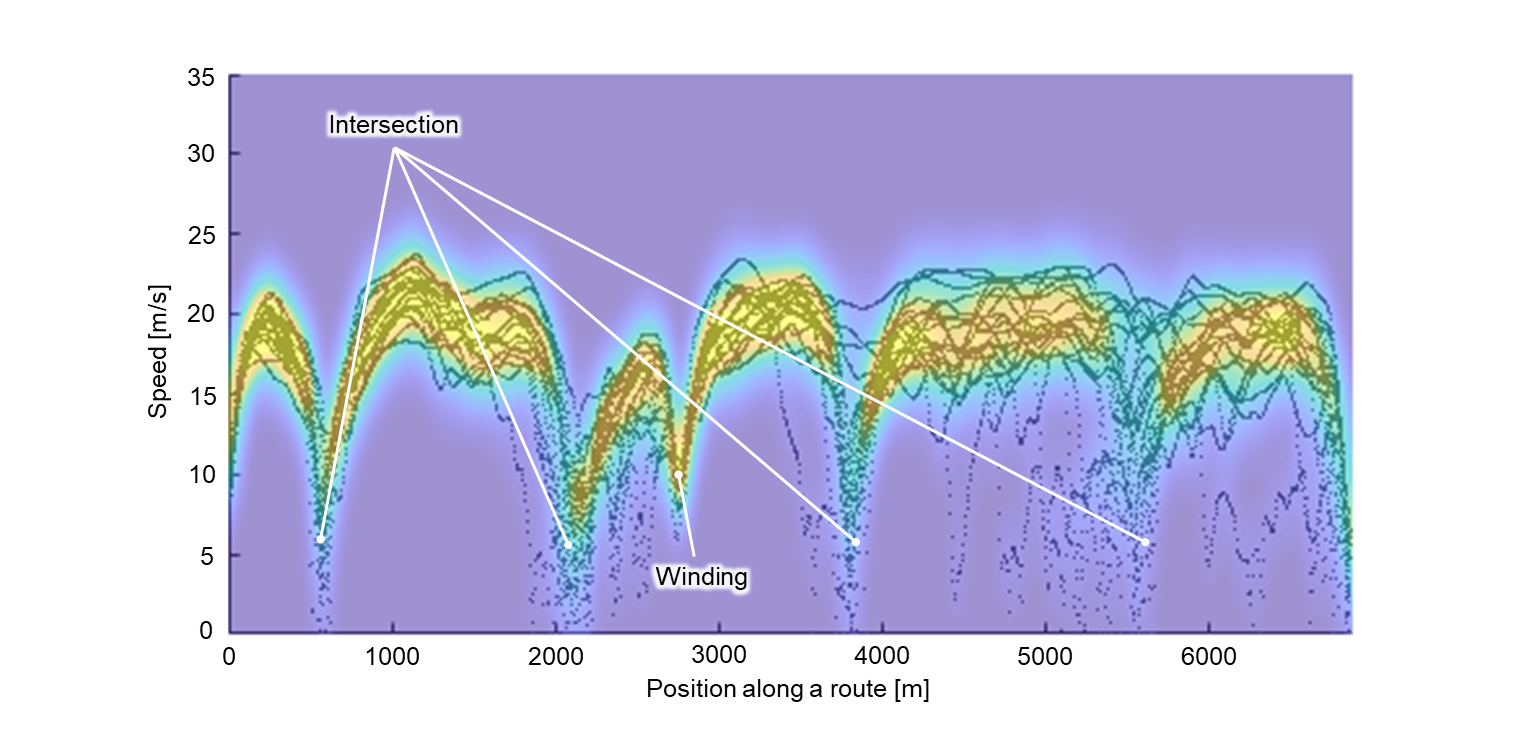
Figure 1: Example of reference data on a certain route.
Figure 2 gives an overview of our method. Each vehicle connected to our system periodically transmits its driving data to a cloud database, which manages the incoming data geographically. Once a vehicle starts automatic control, data on the driving route are retrieved from the database and consecutive behavior of surrounding vehicles is predicted. By referring to data observed at the target vehicle location, vehicle behavior is predicted adaptively to local circumstances (road design, traffic rule, region, etc.) without detecting any behavioral factors.
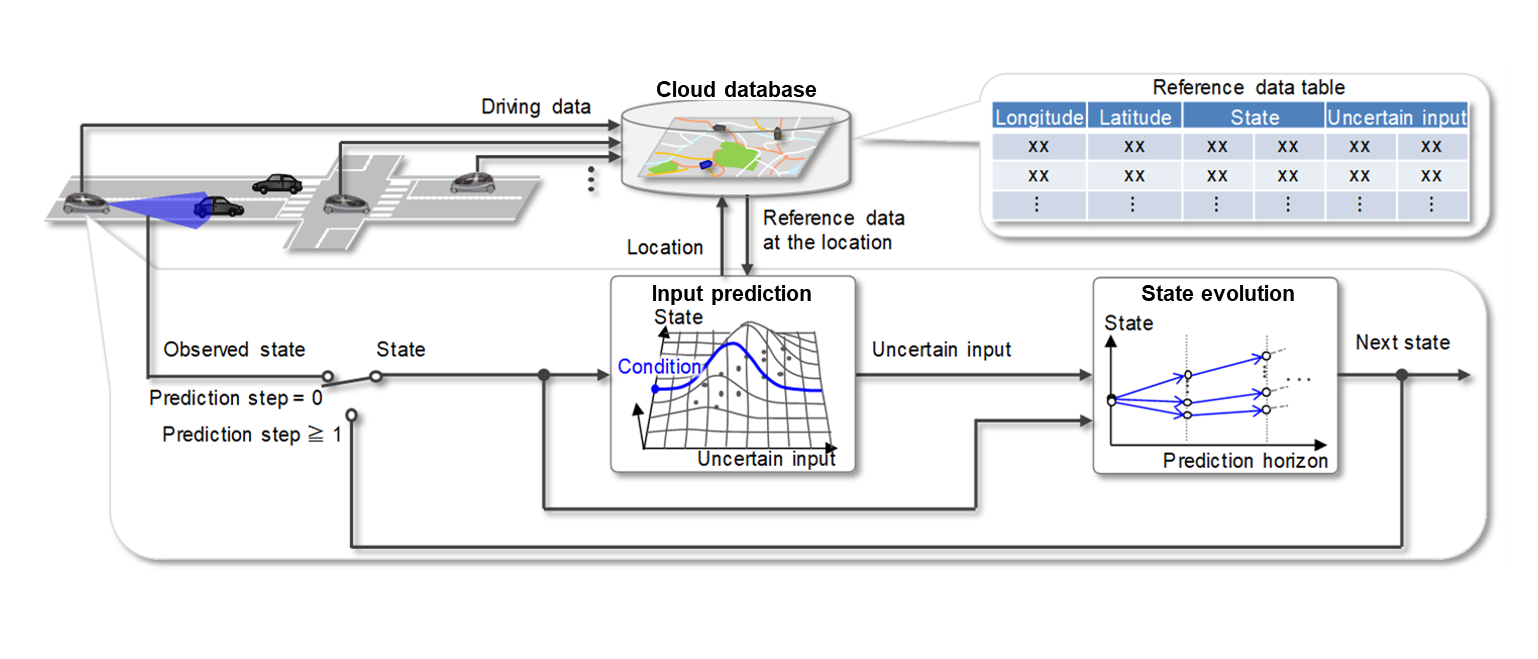
Figure 2: Overview of proposed system.
Figure 3 shows an example of the predicted behavior, where the black line and the colored area represent the actual speed and the probability distribution of the predicted speed within 1-sigma, respectively. The deceleration around 45 seconds is predicted very well. Since this deceleration is caused by the winding road shape, most vehicles in the reference data slow down.
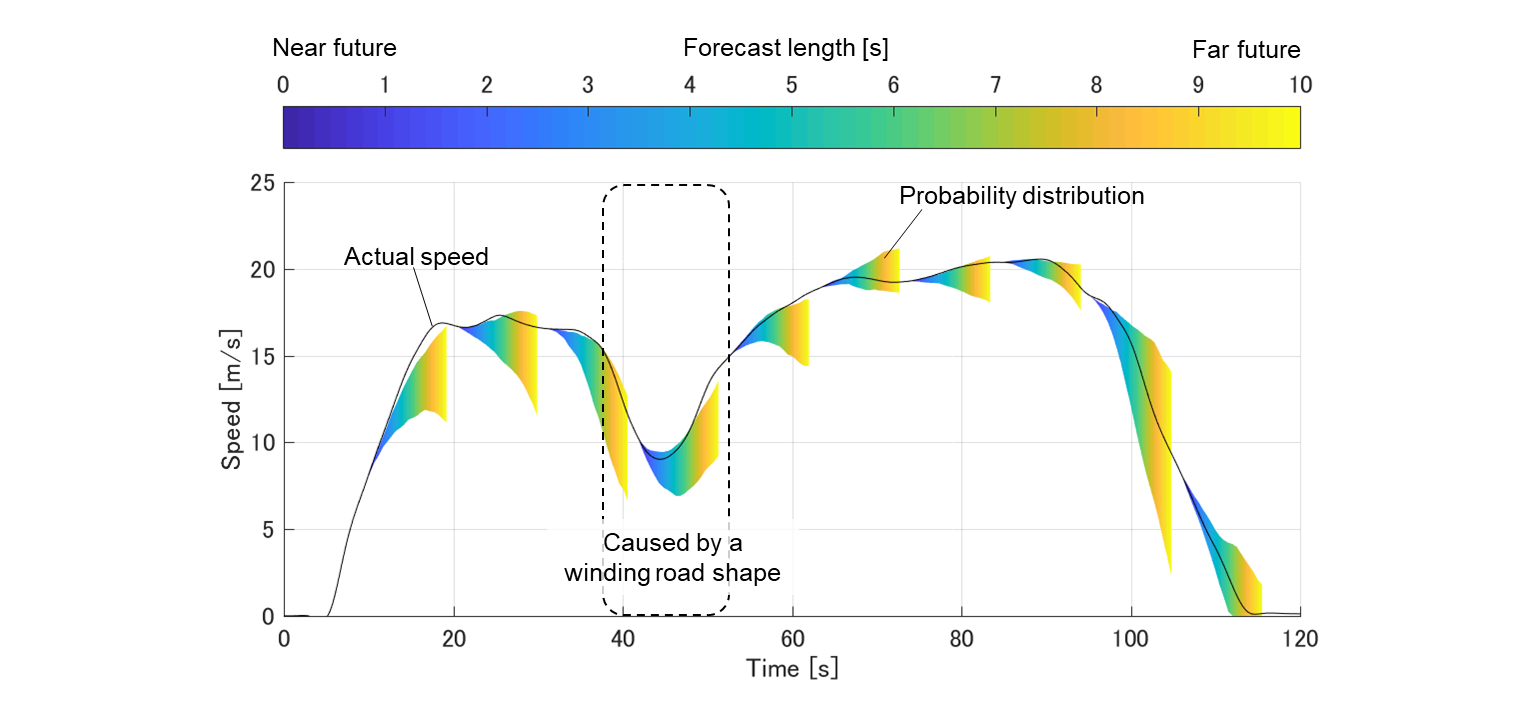
Figure 3: Example of predicted behavior.
We evaluated the performance of the proposed method by applying it to optimization-based adaptive cruise control (ACC), which minimizes energy loss based on predicted preceding vehicle behavior. Experimental results showed that our method is more fuel-efficient than several baseline models. Our technology will make future cars smarter in this way.
For more details, we encourage you to read our paper [1].
