[ⅱ]Autonomous Driving and Electrification for Safety and Security
The elimination of traffic accidents continues to be an important social objective, and the chassis and powertrain devices for driving, turning, and stopping vehicles play an important role in achieving safety. Hitachi believes that the integrated control of these devices will contribute to the creation of new value in the form of security and comfort. This article describes control technologies for safe, secure, and comfortable driving. These include Dynamics planning to maintain comfort by minimizing both acceleration and changes in acceleration, design guidelines to optimize changes in acceleration during cornering, techniques for avoiding discomfort to drivers and passengers when changing lanes on highways, and a vibration suppression technique that takes advantage of EV characteristics to start and stop vehicles smoothly.




The automotive industry is in the midst of a massive shift toward electrification and autonomous driving, and the development of autonomous driving and advanced driver assistance systems (ADAS) is being implemented on a global scale with the aim of achieving zero accidents. As safety technology improves, occupant comfort is also becoming an important focus of future development.
In addition to electric vehicle (EV)-related products, brakes, steering, and suspension that are a determining factor in the performance of vehicles, Hitachi also has expertise in environmental sensing and is developing integrated vehicle control techniques that coordinate and integrate these technologies. This article describes integrated vehicle control techniques developed by Hitachi that offer significant benefits for safety, security, and comfort in automobiles (see Figure 1).
Figure 1 — Integrated Vehicle Control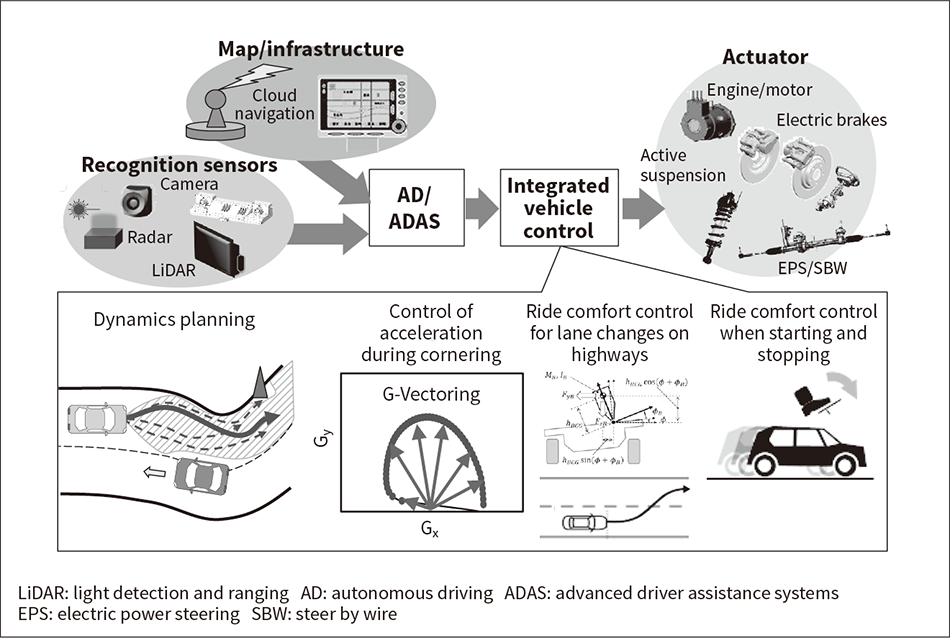 Integrated control of chassis and powertrain devices and sensing technology is used to provide safe, secure, and comfortable driving. These technologies include Dynamics planning, control of acceleration during cornering, ride comfort control when changing lanes on highways, and ride comfort control when starting and stopping.
Integrated control of chassis and powertrain devices and sensing technology is used to provide safe, secure, and comfortable driving. These technologies include Dynamics planning, control of acceleration during cornering, ride comfort control when changing lanes on highways, and ride comfort control when starting and stopping.
In the development of autonomous driving technology, it is necessary to build a system that can safely drive a vehicle to its destination. At the same time, as the level of autonomous driving increases, the driver will be freed from the task of driving and will be able to spend time in a variety of other ways, making the comfort of the cabin a particularly important factor. For example, a skilled driver will do this by making full use of the available lane width when cornering, controlling the speed appropriately based on the corner radius and speed of entry, and minimizing both lateral and longitudinal accelerations and changes in acceleration. In most current ADAS, however, the vehicle travels at a constant speed and stays in the center of the lane. This causes differences in lateral acceleration as well as large changes in overall acceleration, with the potential to adversely affect cabin comfort and cause motion sickness.
Dynamics planning, which is being developed by Hitachi, is an algorithm for achieving a level of ride comfort equivalent to that of a skilled driver when using autonomous driving and ADAS.
Dynamics planning uses the drivable area in front of the vehicle as an input. This drivable area is obtained from cameras and other external environment sensors, map information, and, in the future, from traffic information via the infrastructure. Dynamics planning makes effective use of the width of the drivable area and plots a path that minimizes the acceleration and changes in acceleration applied to the vehicle by following as smooth a curve as possible. Likewise, the speed is determined to keep acceleration small and gradual.
Among the issues with conventional methods for path planning are the high computing power required for complex calculations based on vehicle characteristics such as vehicle weight and length, and the risk that unexpected disturbances such as a strong wind or uneven road surface will interfere with ride comfort. Dynamics planning resolves these issues and simplifies path planning by using Hitachi’s proprietary vehicle control technology to account for the vehicle characteristics and disturbance factors.
Using this system enables an autonomous vehicle to corner smoothly at an appropriate speed, just like a skilled driver, maintaining ride comfort by minimizing both lateral and longitudinal accelerations and changes in acceleration (see Figure 2).
Figure 2 — Dynamics Planning Simulation Example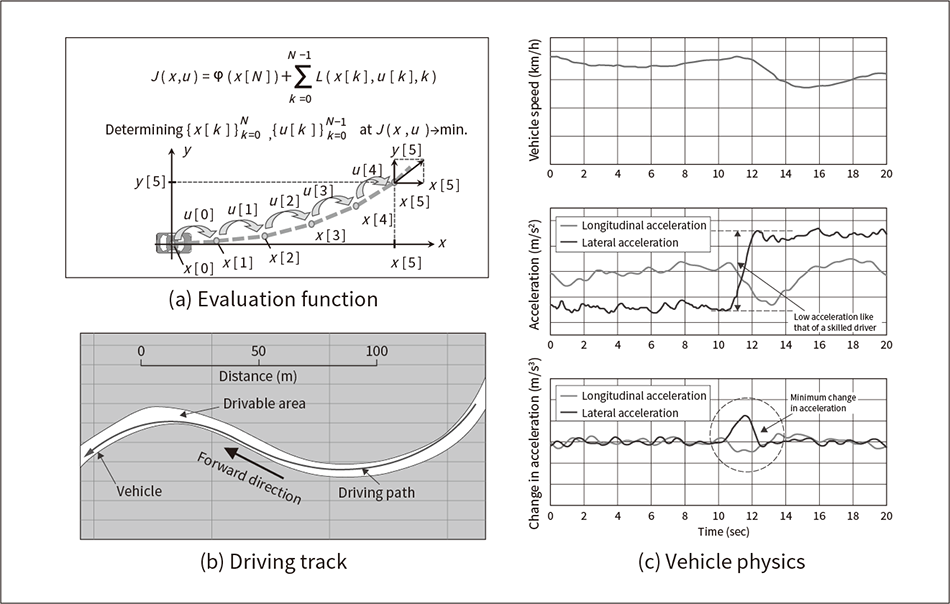 A path and speed that make full use of the available area are determined by defining and minimizing an evaluation function. The acceleration and change in acceleration (jerk) are kept to a minimum by driving the vehicle in accordance with this speed and path.
A path and speed that make full use of the available area are determined by defining and minimizing an evaluation function. The acceleration and change in acceleration (jerk) are kept to a minimum by driving the vehicle in accordance with this speed and path.
Although it is difficult to give a single answer to the question of what constitutes good driving for occupants, some guidelines are necessary for the design of autonomous driving.
Hitachi has been analyzing the driving behavior of skilled drivers to identify guidelines for good driving, especially in situations such as cornering where simultaneous control of acceleration/deceleration and steering is required. Based on this analysis, Hitachi has devised an algorithm (G-Vectoring) for controlling longitudinal acceleration based on steering inputs [see Figure 3 (a)].
Hitachi has successfully demonstrated that automatic control of acceleration based on this algorithm can ensure that the accelerations experienced in the vehicle due to cornering or speed changes vary smoothly, and that it can make the task of cornering significantly less stressful for the driver(2). The objective was to develop an automatic system for steering control based on speed changes during the transient periods at corner entry and exit, tasks previously performed by the driver. Analysis of the cornering practices of the skilled drivers who served as the models for G-Vectoring identified key features relating how they vary acceleration along the path from corner entry to corner exit.
Figure 3 (b) shows driving data from a skilled driver negotiating an L-shaped curve with a minimum turning radius of 40 m, with initial speeds of 40 km/h and 60 km/h respectively. While the 0 m position represents the corner start point, the curvature of the vehicle trajectory increases earlier than this (before the 0 m point), indicating that the driver starts turning on the straight section before entering the corner. Looking at the relationship during cornering between the lateral acceleration Gy and its time derivative [change in lateral acceleration Jy (lateral jerk)], we can see that maximum Jy tends to occur where Gy is small. This result shows that skilled drivers increase the change in acceleration at moments when the acceleration itself is low and perform the turning maneuver in a way that keeps changes in acceleration to a minimum when the acceleration is high. This reduces any changes in acceleration that could destabilize the vehicle during periods of high acceleration (high tire load) and improves safety and confidence during cornering by keeping the factors that adversely affect ride comfort to a minimum, ensuring turning stability, and providing visibility of the road ahead by turning the vehicle toward the inside of the corner early in the turning maneuver.
Figure 3 — Diagram of Cornering Acceleration Using G-Vectoring (a) and Data from Skilled Driver Cornering at Initial Speeds (V0) of 40 km/h and 60 km/h (b)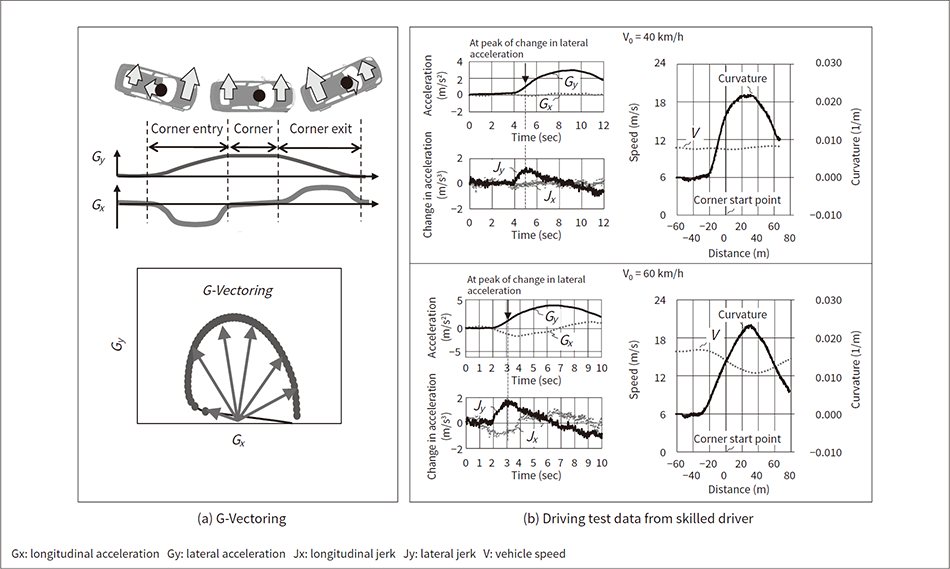 Under both speed conditions, the car is driven in a way that the maximum change in acceleration after the start of the corner occurs when the acceleration is low.
Under both speed conditions, the car is driven in a way that the maximum change in acceleration after the start of the corner occurs when the acceleration is low.
In this way, along with coordinating lateral acceleration with changes in vehicle speed as achieved by G-Vectoring, Hitachi has also succeeded in having autonomous driving mimic how a skilled driver varies acceleration during the transient periods of cornering by developing a control algorithm that can incorporate the relationship between acceleration and changes in acceleration into the design of autonomous driving control(3).
In addition to safety and comfort, shorter travel times are another way in which autonomous driving can enhance value for users. However, keeping the vehicle speed as high as possible given the speed limits and driving conditions requires faster cornering speeds, and this in turn can adversely affect comfort. To address this issue, Hitachi has been seeking to expand the comfortable driving range by improving ride comfort in the high gravitational acceleration (G) range by defining indices that quantify discomfort during high-speed turning. The first was an index of discomfort for the case when a vehicle changes lane to avoid or overtake a slow vehicle on the highway. This is an application where use of autonomous driving is growing.
To create this index, tests were conducted for different lane movement times and chassis device characteristics, with sensory evaluation used to assess the degree of discomfort. To investigate the relationship between the discomfort score reported by the subject and the behavior of the occupant and vehicle, an inverted pendulum model was used to analyze the seated occupant and obtain a correlation between the force applied to the occupant and the discomfort score. As this force is due to roll as well as changes in acceleration, Hitachi is seeking to improve ride comfort by developing a vehicle attitude control technique that uses active suspension to reduce roll. This is in addition to path optimization for minimizing changes in acceleration and high-precision tracking control for following the optimal path.
These technologies can be used to reduce discomfort during lane changes in the high G range, and can also be applied to emergency avoidance for achieving safe and comfortable autonomous driving (see Figure 4).
Figure 4 — Inverted Pendulum Model of Occupant and Discomfort Reduction Methods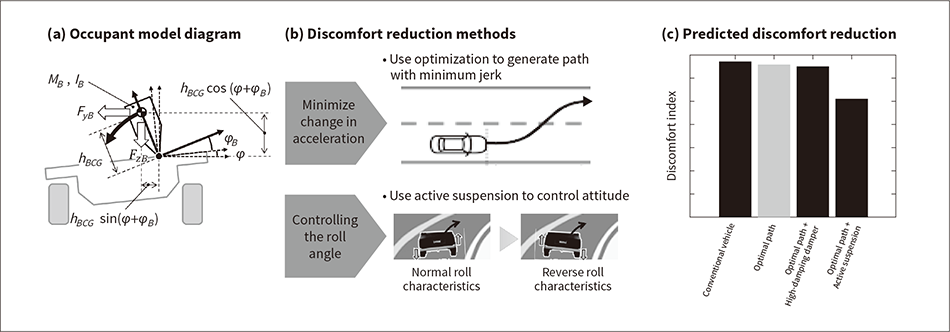 The force applied to the occupant is reduced by changing the acceleration and controlling the roll angle.
The force applied to the occupant is reduced by changing the acceleration and controlling the roll angle.
Figure 5 — Vibration Suppression for Electric Vehicle (EV) Starting and Stopping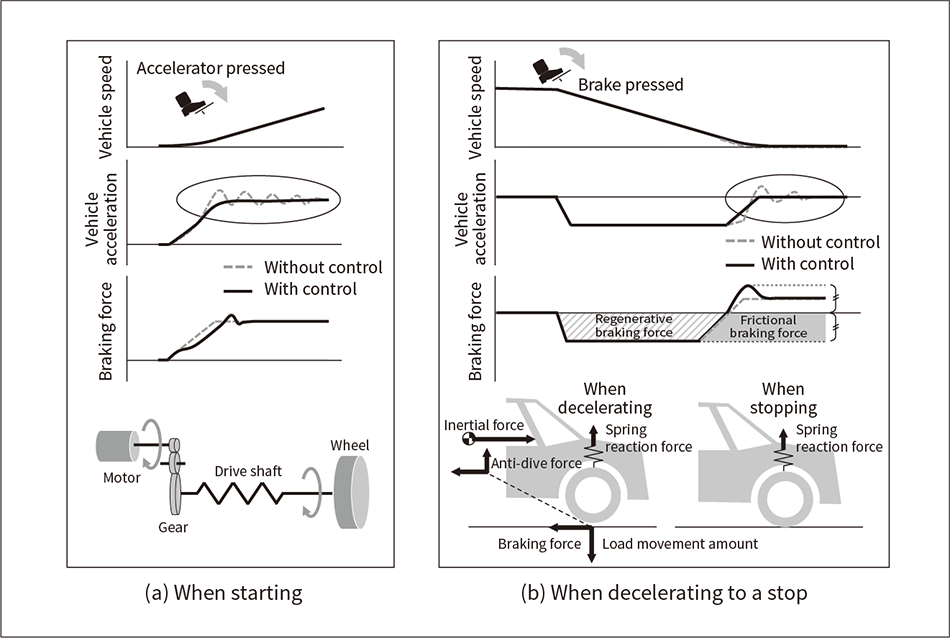 The motor torque is automatically corrected for both starting and stopping to suppress fluctuations in vehicle acceleration.
The motor torque is automatically corrected for both starting and stopping to suppress fluctuations in vehicle acceleration.
As the electric motors that drive EVs have higher torque responsiveness and precision than internal combustion engines, EVs are recognized as having the potential to offer smoother, more responsive, and more comfortable driving. Unfortunately, electric motors are also inherently prone to vibration when starting and stopping, and so suppressing these vibrations is an important factor in achieving the comfortable ride experience that is typical of EVs.
The vibrations at startup are caused by resonance in the driveline. The drivetrain of an EV includes a drive shaft, which is a spring element located between the motor and the tire. This forms a two-inertia system that has a resonance point [see Figure 5 (a)]. As a result, large changes in motor torque cause the motor speed to oscillate and this propagates through to the vehicle where it is felt by the occupants as an uncomfortable vibration.
To resolve this issue, Hitachi is developing a vibration suppression control technique that uses model-following control. This works by estimating the motor speed for a non-vibrating system that can then be compared with the actual speed to determine the speed oscillation. Correcting the motor torque so as to counteract this oscillation can then successfully suppress the vibration. The difficulty with developing this in practice was that some means was needed of eliminating the external disturbances that are also present in the detected speed. This was resolved by using disturbance estimation and filtering.
The vibrations when coming to a stop, on the other hand, are caused by the vehicle being shaken by the remaining suspension spring reaction force after the load transfer associated with deceleration has ceased at the moment of stopping [see Figure 5 (b)]. These vibrations do not occur just on EVs, and it is typical for drivers to reduce the vibration by applying less braking as the vehicle comes to a stop. However, it is difficult to operate the brakes perfectly in all situations, and it is often impossible to fully control the vibration.
Therefore, a technique is being developed to suppress vibration during stopping by temporarily increasing the motor torque so as to weaken the braking force acting on the vehicle and keep the spring reaction force at the time of stopping to a minimum. The key is to develop a means of accurately estimating the frictional braking force that is offset by the motor torque, and this was resolved by using learning-based control and integrating sensor information.
Hitachi is developing technologies that contribute to the safety and comfort of EVs in addition to the above-mentioned controls based on motor and inverter technologies that it has fostered over the years, and will contribute to the realization of a sustainable society through the widespread use of EVs.
This article has described Hitachi’s integrated vehicle control techniques that get people to their destination safely while also ensuring that the experience is a relaxing and comfortable one. Making people feel comfortable and relaxed reduces the pressures of travel and makes their journey a safer one. As the trend for electrification progresses, expectations are rising for autonomous driving and ADAS. Hitachi will continue to contribute to the realization of a sustainable society by providing advanced mobility solutions that accelerate the improvement of safety, security, and comfort, also contributing to environmental conservation by leveraging strengths in integrated vehicle control technology.
