[ⅲ]Connected Car Technologies and Services to Realize Comfortable Transportation Society
The automotive industry has seen major changes over recent years. Autonomous driving and driver assistance functions are getting better every year along with the steady spread of connected car services that utilize communications to deliver new value. Alongside these developments, Hitachi Group has been working hard to develop and commercialize the vehicle electronic control units required by these autonomous and connected cars. This article describes the product features of the central gateway units, AD-ECUs, and map position units that play a core role in vehicle architectures, and also looks ahead to the future of automotive E/E architectures.






Competition among automotive manufacturers is becoming more intense as they work on the development of autonomous driving to address societal issues such as preventing traffic accidents and making it easier for the elderly to get around. Furthermore, autonomous driving and driver assistance functions will need to deliver high levels of safety if accidents caused by autonomous vehicles are to be prevented.
Another topic attracting attention is that of connected cars, which have the potential to deliver more user-friendly services by maintaining always-on communication links to data centers and other infrastructure. Services that use this communications capability are also starting to appear, such as the over-the-air (OTA) upgrading of software for the post-sale upgrading or updating of vehicle functionality.
Hitachi Group (Hitachi) has been combining its automotive system technologies with information and communication technologies developed in a wide range of product sectors to develop vehicle electronic control units and center services that feature a mix of safety and convenience(1), (2), (3). This article describes vehicle electronic control units from Hitachi with a particular focus on autonomous and connected cars.
Figure 1 shows one architecture used for vehicle systems. This is called a “domain architecture,” because it is made up of functional units called domains with multiple electronic control units (ECUs) and a domain controller to coordinate the operation among the individual ECUs. Examples of domains include the chassis, powertrain, and autonomous driving/advanced driver assistance system (AD/ADAS) domains. The domains interconnect via a central gateway unit that controls inter-domain communications and monitors the network for unauthorized access.
The autonomous driving electronic control unit (AD-ECU) domain controller performs supervisory control of the vehicle based on large amounts of information about the surrounding environment acquired by stereo cameras, radar, and other sensors. Along with numerous sensors, AD and ADAS functions also require a map position unit (MPU) to provide topographical and other information about the road ahead for a distance of several hundred meters to several kilometers. This map information needs to be regularly updated to keep it up to date.
By connecting to data centers via the central gateway unit, vehicle systems have access to a wide range of center services for things like software and map updating. It is important that the central gateway unit also has cybersecurity functions to ensure that interoperation with center services is secure.
The following sections go into more detail about the central gateway unit at the heart of the vehicle architecture, the AD-ECU, and the MPU. Hitachi has been a leader in bringing these vehicle electronic control units to market and supplies them to a range of automotive manufacturers(1), (2), (3).
Figure 1 — Vehicle System Architecture The figure shows a domain architecture, which features ECUs grouped into separate functional domains and domain controllers that coordinate the operation of the individual ECUs. The incorporation of a central gateway unit for connecting to data centers means the architecture also supports interoperation with center services.
The figure shows a domain architecture, which features ECUs grouped into separate functional domains and domain controllers that coordinate the operation of the individual ECUs. The incorporation of a central gateway unit for connecting to data centers means the architecture also supports interoperation with center services.
Figure 2 — Central Gateway Unit The unit has functions for vehicle communications data, information security, and the OTA software updating of control software via wireless networks.
The unit has functions for vehicle communications data, information security, and the OTA software updating of control software via wireless networks.
Hitachi has developed a central gateway unit with functions for vehicle data communications, data security, and the OTA software updating of control software via wireless networks (see Figure 2).
Greater use of automotive electronics and the emergence of autonomous driving have dramatically increased the volume of communications handled by onboard networks. To cope with this increase, the central gateway unit is equipped not only with multi-channel Controller Area Network (CAN), which is one of the main network standards used in automotive applications, but also with automotive Ethernet, which enables wider bandwidth communications. In addition, to protect the vehicle from threats arising both internally and externally and to prevent attacks from outside penetrating the onboard network, the central gateway unit is also equipped with functions for: (1) filtering out unauthorized communications, (2) secure boot to detect unauthorized software updating, and (3) bus load monitoring to detect denial of service (DoS) attacks and other unauthorized access.
Hitachi provides everything in one stop, from a data center that distributes updates based on the vehicle configuration (OTA data center) as Lumada’s solution for the wireless updating of vehicle software, to vehicle electronic control units (see Figure 3).
The central gateway unit receives updates from the OTA center and manages the process of upgrading the vehicle control software. Along with the ability to roll-back an update in the event of a problem, to maintain software integrity, the system is also designed to complete upgrades quickly and to keep the period of vehicle unavailability as short as possible by downloading updates in the background before applying them. To ensure that software upgrading is highly reliable, security risks such as updates being leaked or the unauthorized overwriting of software are minimized by encrypting updates and verifying their digital signatures.
In anticipation of the likely future evolution of vehicle architectures, Hitachi is looking to move to the use of integrated ECUs that are equipped with higher performance microcomputers to consolidate vehicle control functions other than communications and security.
Figure 3 — Solution for Wireless Updating of Vehicle Software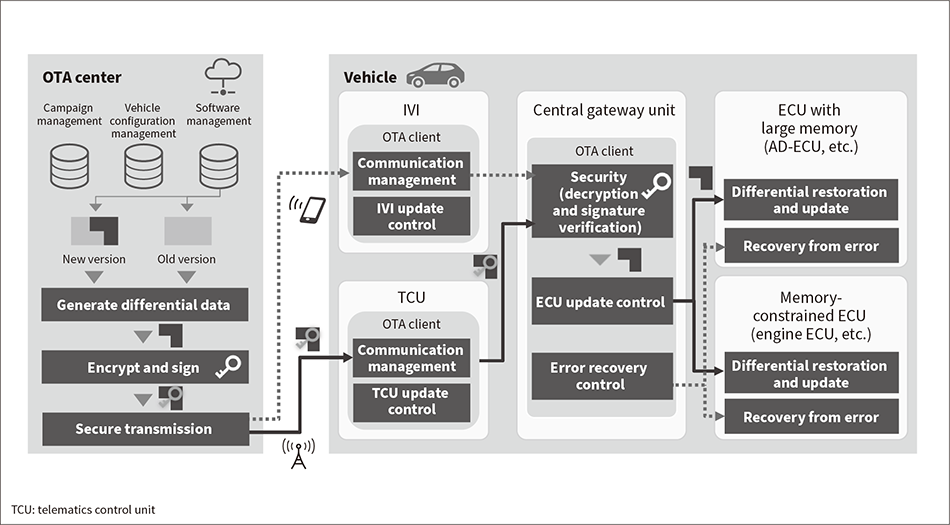 Hitachi provides everything in one stop, from software updating via an OTA center to vehicle electronic control units.
Hitachi provides everything in one stop, from software updating via an OTA center to vehicle electronic control units.
Figure 4 — AD-ECU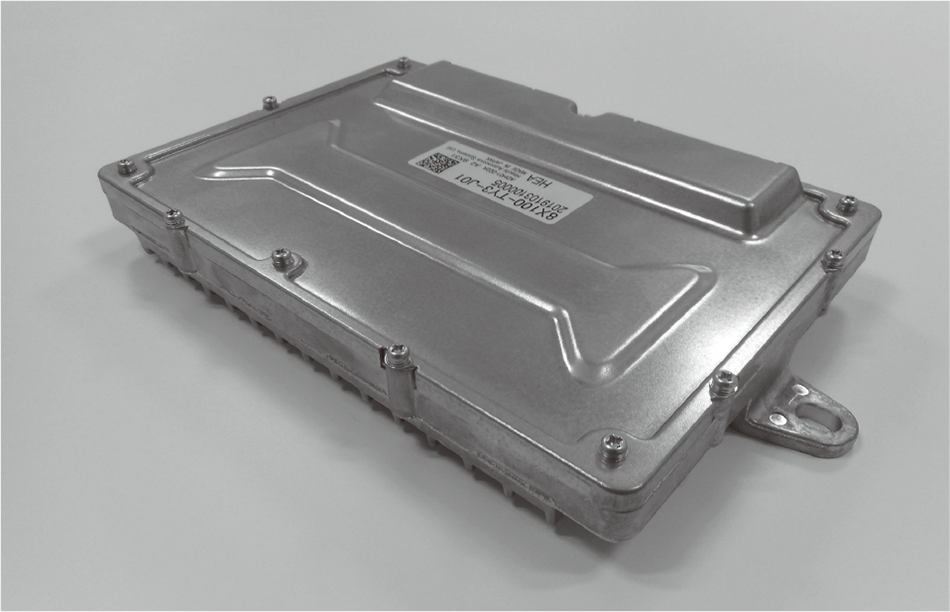 The unit delivers both safety and high-speed execution with separate central processing units (CPUs) for recognition and vehicle control.
The unit delivers both safety and high-speed execution with separate central processing units (CPUs) for recognition and vehicle control.
Integrated vehicle control involves the use of stereo cameras and other sensors to monitor the area around the vehicle, combining data from these different sensors (“sensor fusion”) to identify nearby objects such as other vehicles or traffic signs, generating a trajectory for the vehicle based on these sensing results, and then controlling the vehicle to follow this trajectory.
As more advanced autonomous driving means a significant increase in the total number and different types of sensors, high-speed data transmission is needed to handle the huge volume of sensor data that results. A high level of processing performance is also needed to interpret all this sensor data. Moreover, if autonomous driving is to be safe, the control processing must be completed within the allotted time and the resulting control signals must be passed reliably to the actuators. The AD-ECU must satisfy all of these varied requirements.
Hitachi has built up considerable experience with the commercial production of these devices for use in many different vehicle models since it released its first production ADAS-ECU in 2009, which was equipped with driver assistance functions such as use of collision damage mitigation braking. An AD-ECU developed based on technologies honed in the ADAS-ECU supports highly accurate and integrated vehicle control and features both safety and high-speed execution, satisfying the Automotive Safety Integrity Level-D (ASIL-D) functional safety criteria and having separate central processing units (CPUs) for recognition and vehicle control (see Figure 4). It can also handle high-speed communications, with support for Ethernet as well as CAN. Likewise, the AD-ECU supports the wireless updating of vehicle control software from an OTA center provided by Hitachi.
In the future, Hitachi intends to further enhance performance and functionality to enable more advanced forms of autonomous driving.
Figure 5 — Map Position Unit This unit holds map information and can provide lane-level vehicle positions by means of a precision positioning technique that combines information from a global navigation satellite system (GNSS) with gyroscope and acceleration sensors.
This unit holds map information and can provide lane-level vehicle positions by means of a precision positioning technique that combines information from a global navigation satellite system (GNSS) with gyroscope and acceleration sensors.
Advanced forms of integrated vehicle control include things like assisting drivers with overtaking or automatically following the route specified by a car navigation system. These features all require topographical information about the road ahead as well as accurate vehicle positioning right down to the level of lanes. This in turn requires precise maps acquired by the lane-level measurement of roads and the ability to determine vehicle position with this level of accuracy. However, while vehicle positioning is typically performed using a global navigation satellite system (GNSS) such as the Global Positioning System (GPS), vehicle positions provided by a GNSS are usually only accurate to within a few meters. As positioning is also unreliable in urban, mountainous, or other such areas with poor GNSS signal reception, relying on GNSS alone to obtain lane-level positioning accuracy is problematic.
Overcoming this challenge requires use of the location information provided by the map together with sensor fusion to improve vehicle positioning accuracy by combining sensor and GNSS data. Hitachi’s MPU enables precise control of driving by using a precision positioning technique to translate the route information from the navigation system into lane-level recommendations for how to reach the destination that can be passed to the integrated vehicle control function. The positioning technique augments the precise mapping information contained in the MPU with gyroscope and acceleration sensors as well as the GNSS (see Figure 5). This precise mapping information needs to be kept up to date, and this is done by automatic OTA updates to enhance user convenience.
Along with further improving vehicle positioning accuracy, Hitachi is looking to utilize the MPU to provide driver assistance functions such as automatic deceleration prior to cornering. As the MPU is able to hold road maps of the sort used for car navigation as well as precise lane-level mapping information, this can be done by using these maps to provide information such as speed limits or the curvature of an upcoming corner to the integrated vehicle control functions.
The ongoing addition of new functions such as AD and ADAS means that each vehicle now contains more than 100 ECUs. One issue with this is the added weight and assembly cost for the more extensive wire harnesses (power supply and signal cabling) needed to accommodate this higher number of ECUs. As a result, most vehicles now use a domain architecture whereby functions are consolidated and integrated into separate domains to keep the number of wire harnesses and ECUs to a minimum (see Figure 1).
It is anticipated that this will be succeeded in the future by a new generation of zone architectures that further integrate the different domains (see Figure 6).
Zone architectures feature integrated ECUs that run software for a number of different domains and zone ECUs that collect information from different regions of the vehicle (front or rear, left or right) regardless of domain. This cross-domain integration of ECUs is expected to cut the cost of the electric/electronic (E/E) architecture by around 25 to 50% compared to past domain architectures.
As the information collected by zone ECUs combines all the different domains, an Ethernet backbone network is required with a higher bandwidth and better timing control than past architectures. Similarly, integrated ECUs will need to overcome new problems such as how to concurrently host many software packages with very different safety requirements. On the other hand, the ability of a zone architecture to consolidate information and integrate control across different domains also offers benefits such as new forms of vehicle control that have been difficult to implement in standalone domains, vehicle diagnosis based on a combination of information, and efficient OTA software updating.
Figure 6 — Zone Architecture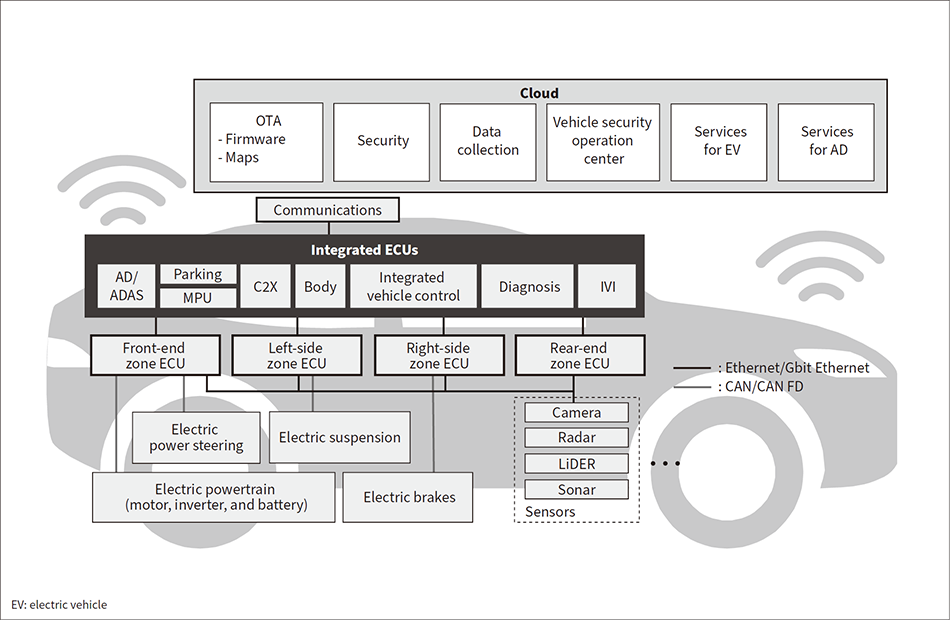 Zone architectures combine integrated ECUs that run software for a number of different domains with zone ECUs that collect information from different regions to the front and rear or left and right of the vehicle. They enable new forms of vehicle control, vehicle diagnosis based on a combination of information, and efficient OTA software updating.
Zone architectures combine integrated ECUs that run software for a number of different domains with zone ECUs that collect information from different regions to the front and rear or left and right of the vehicle. They enable new forms of vehicle control, vehicle diagnosis based on a combination of information, and efficient OTA software updating.
This article has described the product features of vehicle electronic control units that underpin the achievement of autonomous vehicles and connected cars and the future outlook for E/E architectures. In the future, Hitachi intends to draw on its extensive knowledge of vehicle electronic control units and the information, control, and implementation expertise it has gained in the fields of IT and operational technology (OT) to play its part in the new automotive era.
