With countries around the world working to achieve a decarbonized society, the use of decarbonized fuels in internal combustion engines is attracting interest as a way to achieve carbon neutrality. Examples include hydrogen and biomass fuels derived from renewable energy sources. However, using these fuels to ensure a stable energy supply is difficult since their reserves vary by region and time. Hitachi has addressed this problem by developing an automated machine learning technology for engine control parameters that enables multiple fuels to be used together in combination with the goal of enabling effective use of decarbonized fuels. The technology learns highly efficient engine control parameters by autonomously acquiring the required data in response to changes in fuel type and mixture state as the engine runs. This article provides an overview of the technology and presents the results of an evaluation carried out on a prototype engine system.





In 2020, Japan declared its intention to become carbon neutral by 2050 through a net reduction of greenhouse gas emissions to zero. Policies have been announced that target a greenhouse gas reduction of 46% from the 2013 level by 2030, with ongoing efforts thereafter to reduce greenhouse gases by 50%(1). Similar moves to create a decarbonized society are taking place in Europe and other countries worldwide.
Renewable energy-derived hydrogen and biomass fuels such as bioethanol and biogas are also attracting interest for use in engines powering internal combustion generators and transportation equipment. This hydrogen is produced from water electrolysis powered by solar, wind, or other renewable energy sources. Bioethanol is produced by the saccharification and fermentation of crops such as corn. Biogas is produced by fermenting wastewater or kitchen waste. Biomass fuel proponents are also looking toward materials such as waste cooking oil as future fuel sources. However, since renewable energy sources generate power quantities that vary throughout the day and from season to season, hydrogen production and market supply quantities vary throughout the year. The quantities of the raw materials used to produce biomass fuels also vary by region and season. So engines that can run on a combination of multiple fuel types would be a promising solution.
The current state of the renewable energy economy has led Hitachi to identify the need for a multi-fuel engine system that can run on a combination of multiple fuel types. The company has developed an automated machine learning technology for engine control parameters that learns high-efficiency engine control parameters by responding to changes in fuel type and mixture state while the engine is running to autonomously acquire the required data. A prototype engine system with the technology installed in it has attained highly efficient combustion through a combination of hydrogen and biomass fuel while minimizing manual engine operation. This article provides an overview of Hitachi’s automated machine learning technology for engine control parameters, along with the results of evaluation testing on it.
This section provides an overview of multi-fuel engine systems that run on a combination of multiple fuel types. It also looks at the challenges of multi-fuel engine control, and provides a general description of Hitachi’s automated machine learning technology for engine control parameters.
Figure 1 — Engine Controller Inputs and Outputs for Multi-fuel Engine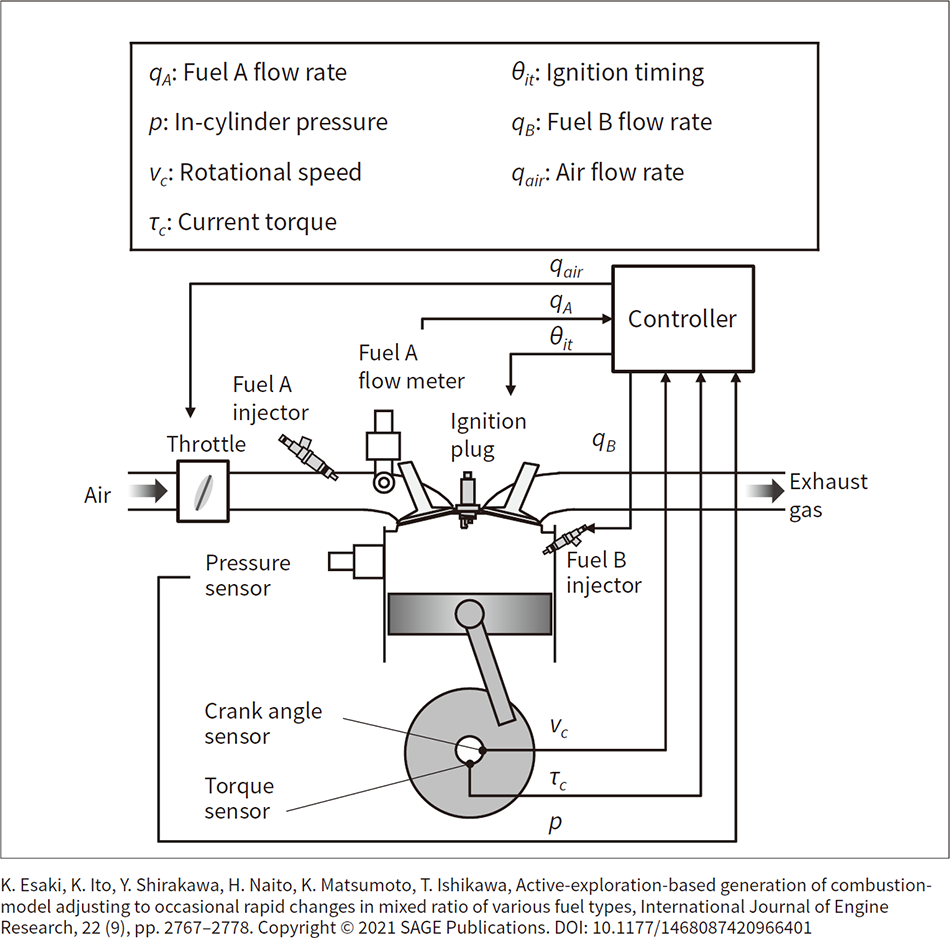 The inputs to the engine controller are the Fuel A supply flow rate, in-cylinder pressure, rotational speed, and current torque. The outputs from the controller are the ignition timing, Fuel B supply flow rate, and intake air flow rate.
The inputs to the engine controller are the Fuel A supply flow rate, in-cylinder pressure, rotational speed, and current torque. The outputs from the controller are the ignition timing, Fuel B supply flow rate, and intake air flow rate.
Hitachi has previously developed a multi-fuel fuel-reforming engine system(2), (3). Fuel reforming engine systems are engine systems composed of a reformer added to a conventional engine. The reformer uses the engine’s exhaust heat along with methane gas and ethanol to generate reformed gas containing hydrogen. The engine burns a mixture of gasoline (the base fuel), methane, ethanol, and hydrogen. So fuel reforming engine systems are multi-fuel engine systems that can use multiple types of fuel in either liquid or gaseous form. Figure 1 shows the control inputs and outputs of a multi-fuel engine system. The system shown burns a mixture of Fuel A (a fuel such as hydrogen) and Fuel B (the base fuel). The inputs to the controller are the Fuel A supply flow rate (qA) input from the Fuel A flow meter, the in-cylinder pressure (p) input from the pressure sensor, the rotational speed (vc) input from the crank angle sensor, and the current torque (τc) input from the torque sensor. These inputs are collectively referred to as the combustion state. The outputs from the controller are the engine system’s control parameters. They are the ignition timing (θit) output to the spark plugs, the Fuel B supply flow rate (qB) output to the Fuel B injector, and the intake air flow rate (qair) output to the throttle.
When running a conventional engine, the output values from the controller are set by using a control map and the values input to the controller. The control map uses a lookup table format to store the control parameters used to attain the required engine speed and required engine torque. An actual engine needs to be run manually to create the control map that will be used to control the engine with high thermal efficiency while handling variations in fuel type and mixture state as needed to accommodate a multi-fuel engine system. The types and ratios of the fuels to be used need to be anticipated beforehand at this point, and used together in a number of different ratios. However, predicting the fuel mixed ratios ahead of time is impossible since the fuel types and mixture ratios supplied to the running engine will vary, and the reformed gas composition will change as the reformer’s operating environment changes.
One possible method of overcoming this challenge is to create a control map in advance by constructing an engine system simulator and using simulation data for every fuel mixed ratio that could possibly be used. However, the engine combustion is so intense and turbulent that it cannot be approximated by laminar flow combustion, rendering it impossible to make the same sort of theoretical estimates of combustion states as are made for laminar flow combustion. So the only way to construct a simulator is to run an actual engine and collect data, but it is difficult to manually run the actual engine ahead of time at every possible fuel mixed ratio.
One possible alternative is to create a control map by running an actual engine in an exploratory manner without manual operation. This method is known as reinforcement learning. The operating agent acts in a random manner in an unknown operation environment, letting it learn the operation rules by receiving feedback from the operation environment. When the operating agent described by reinforcement learning is an actual engine, the control map is learned by running the engine while the control parameters are changed at random. Meanwhile, there will be regions of abnormal combustion in the engine’s control parameter space, and these regions cannot be defined in advance. So, in a worst-case scenario, by running the engine while changing the control parameters at random, the controller could specify a control parameter in a region subject to abnormal combustion resulting in engine shutdown or failure if abnormal combustion occurs.
To summarize the discussion above, controlling an engine with high thermal efficiency while handling variations in fuel type and mixture state involves two challenges: (1) the difficulty of manually running an actual engine at every possible fuel mixed ratio, and (2) the possibility of abnormal combustion occurring when running the engine as the control parameters are changed at random.
This technology works by making use of the fact that, when multiple fuels are mixed, the combustion state changes continuously in response to changes in the fuel mixed ratio(4).
Since the combustion state varies in a continuous manner relative to changes in the fuel mixed ratio, a small difference in fuel mixed ratio results in a small difference in the combustion state. The technology makes use of this characteristic to reduce the engine’s operation data volume to deal with the first of the two challenges defined above. Specifically, the only data acquired in advance is the operation data generated from the fuel mixed ratio in use when the engine starts running and this data is used to train a control model. The fuel mixed ratio is then progressively changed, and the control model trained in the previous phase is used as a baseline for seeking control parameters yielding higher thermal efficiency (searching phase). The control models of each phase are then trained (learning phase), and the process is repeated. This approach reduces the amount of data that needs to be acquired since the only engine operation data needed in advance is the operation data generated from the initial fuel mixed ratio.
The continuous manner in which the combustion state varies relative to changes in the fuel mixed ratio results in abnormal combustion regions being surrounded by abnormal combustion precursor regions (regions of low thermal efficiency that still manage to avoid engine shutdown). The technology uses this characteristic to deal with the second of the two challenges and enables the engine to be run in an exploratory manner while avoiding regions of abnormal combustion. Specifically, operation data is not acquired at random during the searching phase. Instead, the control parameters generated by the control model trained in the previous phase are used as the initial values, and the range of operation data to acquire is shifted in the direction of higher thermal efficiency (see Figure 2). The use of this approach means that even when the engine is running in an abnormal combustion precursor region, the low thermal efficiency generated by that region will prevent the range of operation data to be acquired from being shifted toward the neighboring abnormal combustion region. This characteristic enables the process to seek control parameters that yield high thermal efficiency while avoiding abnormal combustion regions. See reference 4 below for a more in-depth discussion of the technology.
Figure 2 — Data Acquisition Point Search Route During Searching Phases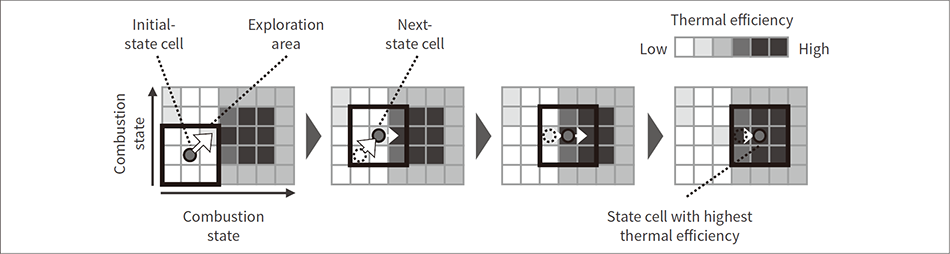 The control parameters surrounding the initial value are searched, and the search range for data to be acquired is shifted in the direction of higher thermal efficiency.
The control parameters surrounding the initial value are searched, and the search range for data to be acquired is shifted in the direction of higher thermal efficiency.
To evaluate its effectiveness, the developed automated machine learning technology was tested in a prototype engine system. The fuels used for the testing were ethanol and hydrogen (biomass fuels). The engine was run manually beforehand on ethanol to acquire operation data and train a control model. During testing, the engine was initially run on 100% ethanol and 0% hydrogen. While continuing to run the engine, the hydrogen ratio was then progressively increased in 2.5% increments (heat value percentage). (Starting at 20% hydrogen, the increases were made in 5% increments.)
Each change in fuel mixed ratio made while the engine was running initiated a searching phase designed to seek control parameters yielding higher thermal efficiency on the basis of the control model trained from the immediately preceding fuel mixed ratio. The process then switched to a learning phase designed to acquire the operation data generated by the control parameters that yielded the higher thermal efficiency. This acquired data was used to train a control model.
Figure 3 shows the thermal efficiency before and after searching. For each hydrogen ratio, the pre-search thermal efficiency is the value in effect when the engine was controlled using the inferred control parameters generated by the control model trained from the immediately preceding hydrogen ratio. Each hydrogen ratio shows a post-search improvement in thermal efficiency, with a maximum improvement of 7.9%. These findings demonstrate that even when using a combination of multiple fuels, the technology enables engines to run at high efficiency with reduced manual operation.
Figure 4 shows the post-search coefficient of variation of the indicated mean effective pressure (COV of IMEP). Generally speaking, COV of IMEP values of up to 3% are considered to indicate stable combustion. All of the COV of IMEP values obtained were no more than 3% for each fuel mixed ratio. These findings show that the technology yields stable combustion without the occurrence of abnormal combustion.
Figure 3 — Pre- and Post-search Thermal Efficiency Evaluation Results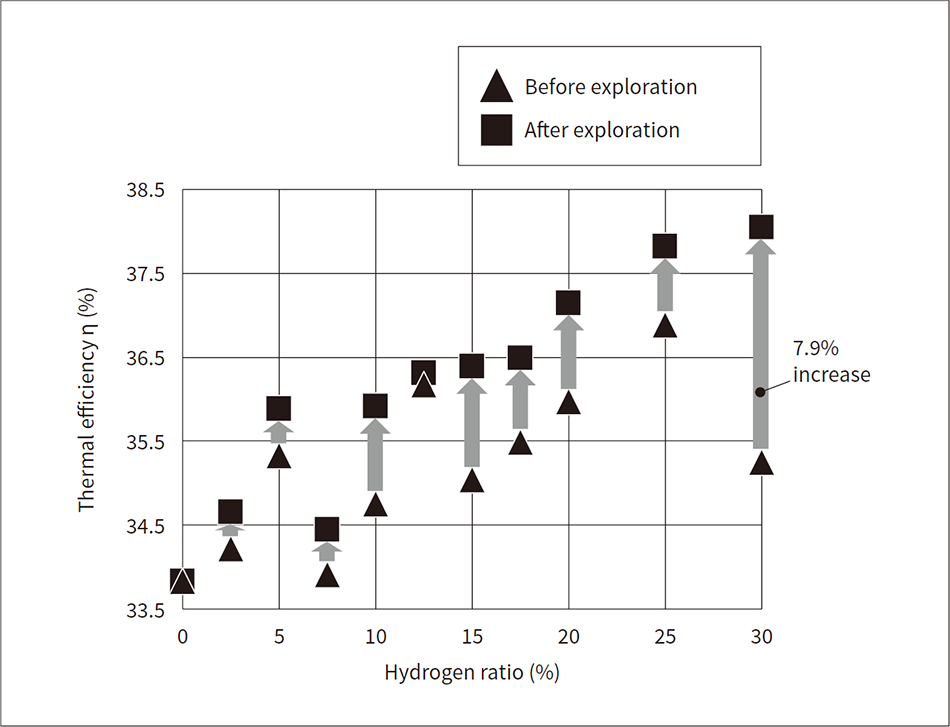 Engine control using Hitachi’s automated machine learning technology for engine control parameters enables operation that responds to changes in hydrogen concentration. The engine’s thermal efficiency is automatically improved by seeking training data acquisition points.
Engine control using Hitachi’s automated machine learning technology for engine control parameters enables operation that responds to changes in hydrogen concentration. The engine’s thermal efficiency is automatically improved by seeking training data acquisition points.
Figure 4 — COV of IMEP Values Found by Evaluation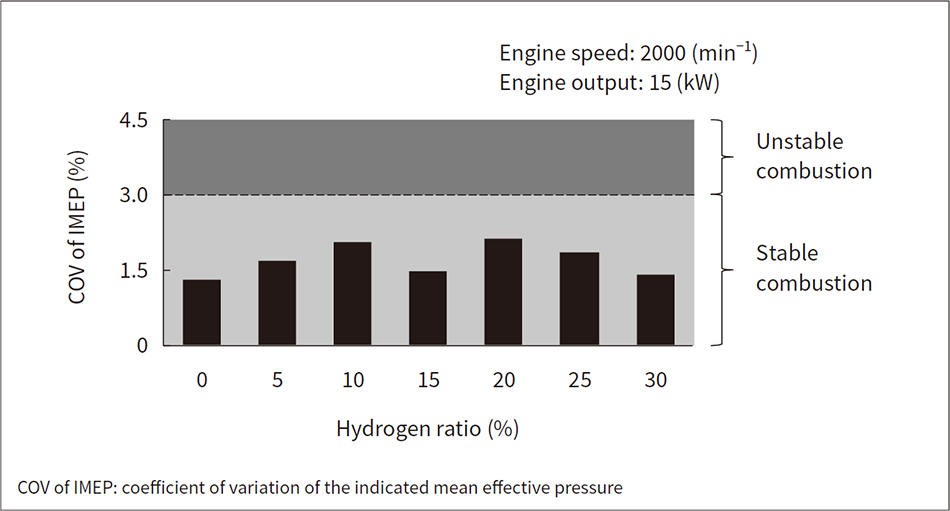 Shown here are the COV of IMEP values found for each hydrogen concentration. Values of up to 3% are generally held to indicate stable combustion. Stable engine operation was attained even when the hydrogen concentration was changed using Hitachi’s automated machine learning technology for engine control parameters.
Shown here are the COV of IMEP values found for each hydrogen concentration. Values of up to 3% are generally held to indicate stable combustion. Stable engine operation was attained even when the hydrogen concentration was changed using Hitachi’s automated machine learning technology for engine control parameters.
This article has described Hitachi’s automated machine learning technology for engine control parameters, designed for use in multi-fuel engine systems.
Fuels are expected to evolve and diversify as the world moves toward a decarbonized society. Engine systems equipped with the technology will be able to support these fuels in response to various needs, enabling use as energy sources that offer greater resilience against climate change.
In the future, Hitachi will work on demonstrating engine systems equipped with the technology while seeking to create energy supply chains that can achieve zero emissions.
