The changing circumstances of the manufacturing and logistics industries, which include labor shortages and fluctuating demand, call for ongoing operational resilience. In response to such challenges, Hitachi’s approach to production line building is based on engaging in collaborative creation with the customer from the concept stage. Hitachi has also been developing an online cyber-physical system that can reconfigure resources and adjust production plans to minimize the impact of delays or other problems that occur due to changes or variability in production conditions. This article uses examples to present the work being done by Hitachi on combining robotics systems with digital technologies.




The manufacturing and logistics industries are experiencing complex and complicated social challenges that include labor shortages, the retirement of skilled and experienced workers, demand for mass customization, and rapid demand fluctuations.
In such an environment, these industries need to adopt sophisticated practices that allow them to maintain ongoing operational resilience in the face of changing circumstances. This includes building production lines capable of mixed-flow production while also utilizing existing equipment to keep investment to a minimum, ensuring the ongoing reliability of equipment operation, the optimization of materials, ordering, and worker assignment, and responding promptly to unexpected changes. Achieving this calls for a combination of automated lines and operational systems that can simulate and execute optimal operating scenarios that dynamically correspond to changing circumstances, something that is difficult to achieve by relying solely on the vocational skills of skilled workers or by installing equipment that simply takes over or automate tasks that were previously done manually by workers.
This article describes how, utilizing solutions that combine robotics system integration (SI) with digital technologies, Hitachi is supporting the building and operation of production and logistics lines that enable customers to respond flexibly to changing circumstances.
Production and logistics lines and their operations are major differentiating factors affecting product quality, production volume, and cost. Manufacturers or logistics operators with strong engineering capabilities are capable of in-house process design, line concept, and line specifications and work with equipment vendors or line builders on the design and building of the lines.
The technical complexity of developing process designs and concepts for production lines that can dynamically respond to changing demands or enable mixed-flow production is increasing because deep expertise and know-how in how to utilize equipment and digital technology are required given cost, resources, and performance constraints.
Hitachi’s approach is to collaboratively work together with customers from the earliest stages such as process design and line conceptualization to build optimal lines. For example, the use of digital engineering tools from this early stage allows Hitachi and customers to materialize line concepts into something tangible in a short period of time and also reduces the risk of rework as line performance and systems can be validated online before the actual line is built (see Figure 1).
Hitachi also aims to make this collaborative process more efficient and effective by using its own simulation technology to identify optimal line configurations and layouts with the desired functions and performance.
Figure 1 — Production Line Building Using Collaborative Creation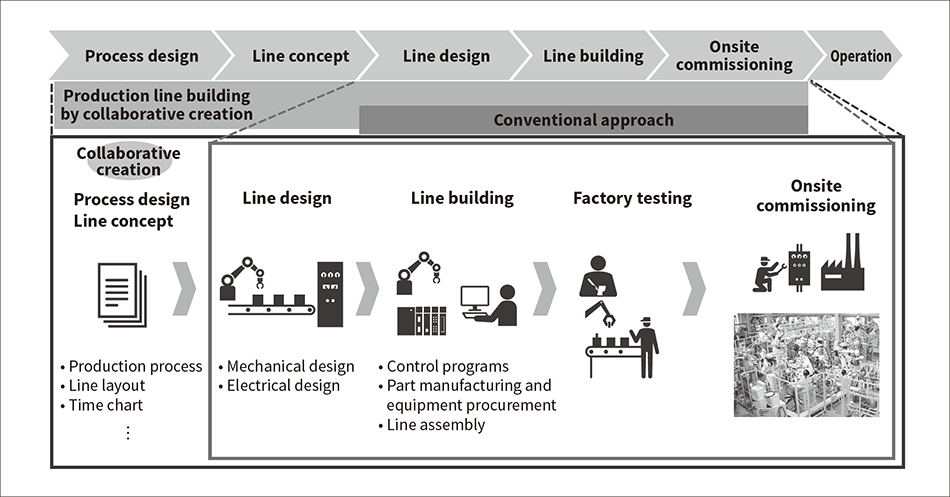 This approach seeks to build optimal production lines through communication with customers, engaging in collaborative creation with them from the process design and line concept stage.
This approach seeks to build optimal production lines through communication with customers, engaging in collaborative creation with them from the process design and line concept stage.
Manufacturing and logistics facilities are forever at risk of delays in production or dispatch due to issues such as plan changes, operational problems, or poor planning accuracy. The sort of plan changes that might occur include a change to the type or quantity of products to be manufactured or dispatched due to fluctuating demand, the handling of irregular requests such as expedited goods, or line delays due to parts shortages or missing inventory. Operational problems may include staff absences or rework caused by production errors as well as equipment faults, brief shutdowns, or adjustments to the line prompted by defects. Similarly, poor planning accuracy may be the result of products having to go through equipment more than once or cycle times being exceeded due to variability in how long different workers take to complete particular tasks.
To deal with delays caused by problems like these, line operation needs to be able to minimize their consequences through the reallocation of resources or by making changes to the plan.
Past practice was to rely on the skills of particular individuals. For example, it would involve the line supervisor keeping track of production progress and the operation of different items of equipment to identify when delays occur and to devise and implement a response accordingly. What is needed for business resiliency, however, is for the line to operate in a way that allows it to adapt to changes like these automatically and with a short cycle time. In response, Hitachi has developed an online cyber-physical system (CPS) that incorporates a virtual line in cyberspace, using this to collect and analyze sensing and production progress data from the equipment along with information on equipment operation. By doing so, it can reconfigure resources and issue plan changes (see Figure 2).
Figure 2 — Benefits of Online CPS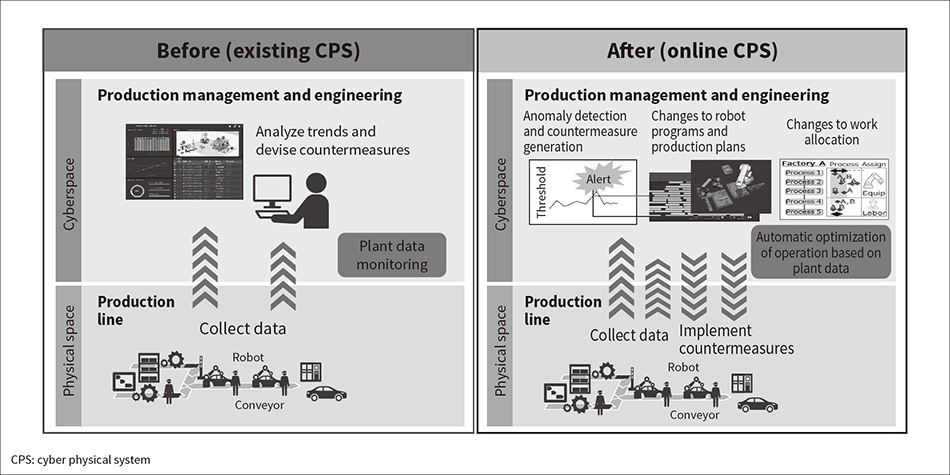 The online CPS provides systems for line operation that can adapt to change in a timely manner by working rapidly through the cycle of first using data collected from the physical equipment as a basis for identifying anomalies and devising countermeasures in cyberspace, and then automatically implementing the resulting work allocation and program modifications.
The online CPS provides systems for line operation that can adapt to change in a timely manner by working rapidly through the cycle of first using data collected from the physical equipment as a basis for identifying anomalies and devising countermeasures in cyberspace, and then automatically implementing the resulting work allocation and program modifications.
The online CPS is a digital solution for overcoming challenges that have been difficult to address in the past. It does this by using information obtained from the line as a basis for automating and speeding up the information cycle of analyzing production data in cyberspace, identifying the optimal line configuration and operation scenario, and using this as dynamic feedback to subsequent line operation. In practice, it is made up of the three solutions described below together with functions for linking these together and filling in the “kiwa” (gaps) between management systems by controlling the line in a way that integrates the physical and informational realms.
Figure 3 — Example Online CPS Use Case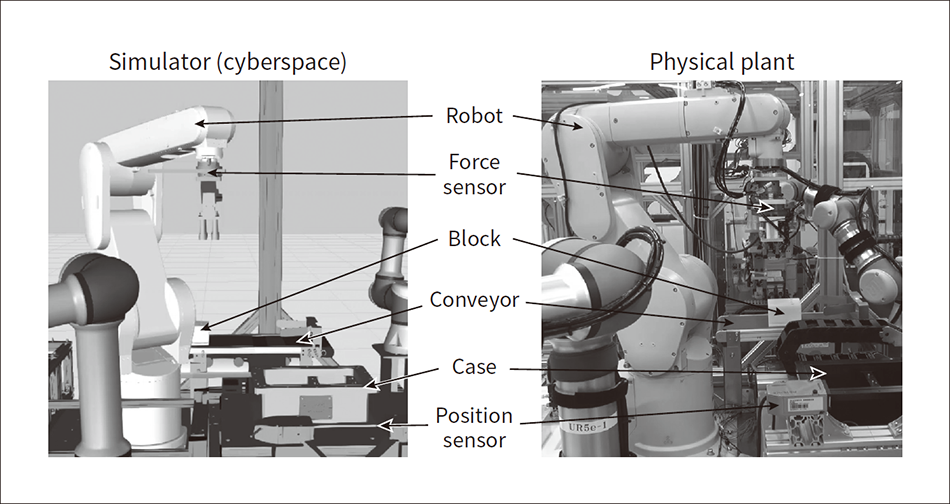 A vertical articulated robot picks up blocks delivered by conveyor and places them in a case. This physical configuration is replicated in cyberspace. Degradation of the conveyor over time shifts the position to which the blocks are delivered and this results in an overload during the block placement step.
A vertical articulated robot picks up blocks delivered by conveyor and places them in a case. This physical configuration is replicated in cyberspace. Degradation of the conveyor over time shifts the position to which the blocks are delivered and this results in an overload during the block placement step.
Figure 4 — System Configuration and Flowchart of Online CPS Use Case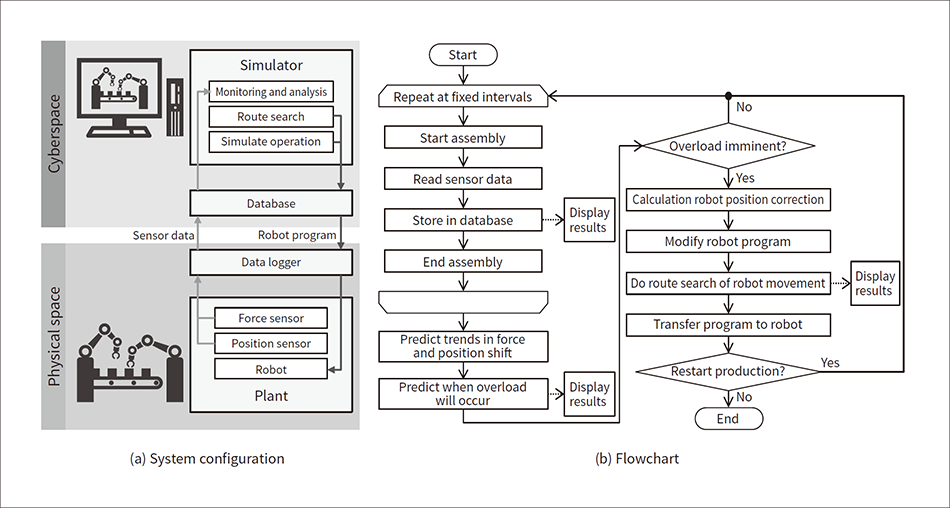 Data is collected from the sensors on the physical equipment and stored in cyberspace for use in analysis and trend prediction. This in turn provides the basis for automatic corrective action whereby corrections are made in the robot program and implemented in the physical equipment. As a result, downtime can be avoided without human intervention.
Data is collected from the sensors on the physical equipment and stored in cyberspace for use in analysis and trend prediction. This in turn provides the basis for automatic corrective action whereby corrections are made in the robot program and implemented in the physical equipment. As a result, downtime can be avoided without human intervention.
This section presents a manufacturing industry use case for the online CPS described above. It involves the analysis of downtime on an assembly line and automatic countermeasures. Figure 3 shows the layout of the assembly line.
The assembly line has a vertical articulated robot that picks up parts (blocks) delivered by conveyor and places them at the required location on the product (a case). A stopper halts the blocks at the desired location at the end of the conveyor. The robot picks up blocks from this location. Each block has a positioning hole and the case has a matching pin. The robot places each block so that these are aligned. Unfortunately, repeated operation over a long period causes the stopper to progressively shift position, resulting in performance degradation. This is caused by things like contact between the blocks and stopper or bumping by the robot when it picks up a block. The result is that the position from which the robot picks up the blocks shifts away from the intended position. This in turn results in contact with the positioning pin on the case when placing a block, leading to frequent short outages due to overloading. While this can be dealt with physically by production engineers repositioning the stopper or in software by adjusting the robot picking position, these measures are an issue because they take a few hours to perform.
To resolve the problem, the online CPS was used to analyze the shift in stopper position and a system was developed that avoids outages by adjusting automatically to match the actual conditions. Figure 4 (a) shows a diagram of the system. This system includes a force sensor fitted at the end of the robot arm to measure the forces involved when the physical equipment picks up or places blocks. A position sensor was also installed next to the robot to measure the block picking action. The data from these sensors was monitored continuously and stored in a way that linked the picking position to the magnitude and direction of the block placement force. In cyberspace, meanwhile, the physical situation was modeled in three dimensions to enable route searches to be performed and simulation of the operation using the robot operation program as input.
Figure 4 (b) shows a flowchart of how the system works. During operation, sensor data is continuously collected and stored. As repetition of the task causes the stopper to shift out of position over time, the force measurement in one particular direction progressively increases. The position sensor readings also change progressively. By collecting this data over a period of time and correlating the values, it is possible to predict the direction and distance of this incremental stopper movement. As ongoing operation will result in an overload outage when the force exceeds the limit, automatic corrective action is taken before this limit is reached. For this system, it involves calculating a correction to the robot’s block picking position based on the predicted direction and distance of stopper movement. The correction is incorporated into the robot operation program in cyberspace and an automatic route search is performed for the new robot picking position. If simulation confirms that the new operation will work correctly, the automatic fix is updated on the physical system.
Use of this system helps to maintain reliable line operation by avoiding downtime without human intervention. While this use case involves an assembly task, Hitachi is also looking at extending it to other work such as materials handling or welding. More information about this particular application can be found in the references(3).
In response to the changing environment for manufacturing and logistics, Hitachi intends to continue supporting the business resilience and ongoing growth of its customers through the development of online CPS solutions and by adopting an approach to production line building that combines robotics SI with digital technologies and is based on collaborative creation.
