Since the accident at the Fukushima Daiichi Nuclear Power Station that occurred during the Great East Japan Earthquake, the Hitachi Group has been developing technologies and onsite work necessary for decontamination, environmental remediation, dealing with contaminated water, removal of spent fuel, and removal of fuel debris. This article introduces the progress Hitachi is making in decommissioning the reactors at the Fukushima Daiichi Nuclear Power Station. Of the remotely operated equipment Hitachi has developed for this work, this article describes the ASTACO-SoRa dual-arm heavy machinery-type robot used for environmental remediation tasks such as debris removal, the PMORPH shape-changing robot and boat-type submersible access devices used for the internal inspection of the containment vessel carried out in order to acquire information necessary for formulating the fuel debris removal plan, and the flexible robot arm capable of heavy-duty tasks under high levels of radiation.


The decommissioning of the Fukushima Daiichi Nuclear Power Station has involved a wide variety of tasks inside the power station, such as decontamination, environmental remediation, dealing with contaminated water, removal of spent fuel, and removal of fuel debris. To this end, the Hitachi Group has been developing necessary technologies and proceeding with onsite work.
This article discusses the technology Hitachi has developed up to this point, the state of progress in onsite work, and key remotely operated equipment. Of the developed robots, working robots include the ASTACO-SoRa dual-arm heavy machinery-type robot that does heavy work in tight spaces, and the flexible robot arm that combines flow actuators with a spring structure while using as few electronic boards as possible to cope with high-radiation environments. Inspecting robots include the PMORPH shape-changing robot, which inspects the insides of a primary containment vessel (PCV) by entering a narrow part to reach the high-radiation area, and the boat-type submersible access device, which inspects the PCV’s groundwater part. The characteristics and conditions for actual robot application are described below(1).
Hitachi is proceeding with work at the Fukushima Daiichi Nuclear Power Station that includes dealing with contaminated water, removing fuel from spent fuel pools, removing fuel debris, taking care of waste, and other reactor decommissioning tasks based on the “Mid-and-Long-Term Roadmap toward the Decommissioning of TEPCO’s Fukushima Daiichi Nuclear Power Station Units 1-4”(2) (referred to as “the roadmap” hereinafter).
This section covers the Hitachi Group’s efforts in the areas of dealing with contaminated water, removing fuel from spent fuel pools, and removing fuel debris.
Contaminated water is created when water is injected into a nuclear reactor to cool fuel that has melted, after the water comes into direct contact with molten fuel. It is also created when rainwater or groundwater flowing into a damaged building mixes with water containing radioactive substances that has accumulated in the underground floors of the building.
To reduce the inflow of groundwater into a building, it is necessary to draw groundwater out of wells (subdrains) located around the building’s periphery to lower the water level of that groundwater, while at the same time using pumps installed inside the building to lower the water level of residual water inside the building. The Hitachi Group has contributed to the suppression of contaminated water generation by installing equipment to purify groundwater drawn from the subdrains (purification equipment for subdrains and other areas) as well as equipment for drawing water from residual water inside the building and transferring it to contaminated-water-treatment equipment (residual water transfer systems inside the building). Furthermore, by changing the positions of pumps in each building’s internal residual water transfer system to the floor drain sump on the bottom floor of each building, Hitachi was able to keep the floor surface of the bottom floor exposed by implement the transfer of residual water, thereby achieving the “Complete treatment of residual water in the building within the year 2020.”*, (3)
After Hitachi developed and installed equipment to filter, deionize, and otherwise treat water processed by contaminated water treatment equipment (high-performance polynuclear species removal equipment) to decrease radionuclides (excluding tritium) to a concentration below the notified concentration limit, and started processing operations in 2015, the plant passed a pre-use inspection in February 2023. Although the water treated by the advanced liquid processing system (ALPS) is currently stored in a tank located within the site of the Fukushima Daiichi Nuclear Power Station, there are plans to dilute it with seawater and discharge it into the ocean.
In the Unit 4 nuclear reactor building, vent gas containing hydrogen from the Unit 3 PCV flowed in via an exhaust pipe, causing a hydrogen explosion that severely damaged the top of the building. The Hitachi Group removed piles of debris from the operation floor on the top of the building, and collaborated with Takenaka Corporation to install fuel removal covers and fuel handling equipment before removing the debris scattered within the spent fuel pool. In parallel with the task of removing debris from inside the pool, Tokyo Electric Power Company Holdings, Inc. also used fuel handling equipment to remove fuel from inside the spent fuel pool, removing 1,535 fuel rods as of the end of December 2014(4).
The Unit 1 nuclear reactor building lost its reactor core cooling function due to the tsunami that followed after the earthquake, and hydrogen from the damaged core leaked inside the building, resulting in a hydrogen explosion that severely damaged the top of the building. The removal of debris from the north side and center area of the operation floor on the top of the nuclear reactor building started from 2018, and the Hitachi Group completed debris fall prevention and mitigation measures by November 2020 for the debris piled up on the south side of the operation floor, including overhead cranes and fuel convertors(5). The plan is to complete placement of a large cover over the entire building, after which the debris will be removed from inside the cover, and fuel handling equipment will be installed. Fuel removal by Tokyo Electric Power Company Holdings is planned to start between 2027 and 2028.
At the time of the earthquake, fuel was stored in the reactor cores of operating units 1 to 3 and as a result of the loss of core cooling functionality due to the tsunami that followed after the earthquake, the fuel, fuel cladding tubes, structures inside the core, and other components melted. The cooled and solidified fuel debris is dispersed throughout the reactor core, the bottom of the reactor pressure vessel, and inside of the PCVs. The Hitachi Group is conducting investigations inside the PCVs to collect information pertinent to the consideration of methods to prepare for full-scale removal of the fuel debris.
During the internal inspection of the Unit 1 PCV carried out in April 2015, a PMORPH shape-changing robot was used to take images inside the PCV (aboveground part outside the pedestal) while collecting temperature and radiation dose information(6). In March 2017, PMORPH-2, which has a sensor unit with attached camera and dosimeter that can be raised and lowered with a winch in place of the camera part of PMORPH-1, was used to take images inside the PCV (underground level outside the pedestal), gather dose information, and examine the spread of fuel debris(7).
From February 2022 to March 2023, a boat-type submersible access device was sent into the underground part of the Unit 1 PCV in order to visually examine the details inside and outside the pedestal, while producing a three-dimensional (3D) map of the underground deposits outside the pedestal and measuring thickness, detecting fuel debris, sampling deposits, and collecting information inside the PCV (inside and outside the pedestal)(8), (9).
To proceed with the reactor decommissioning described in previous section, the Hitachi Group has developed and utilized many types of remotely operated equipment. This section describes examples of that remotely operated equipment.
Figure 1 — ASTACO-SoRa Dual-arm Heavy Machinery-type Robot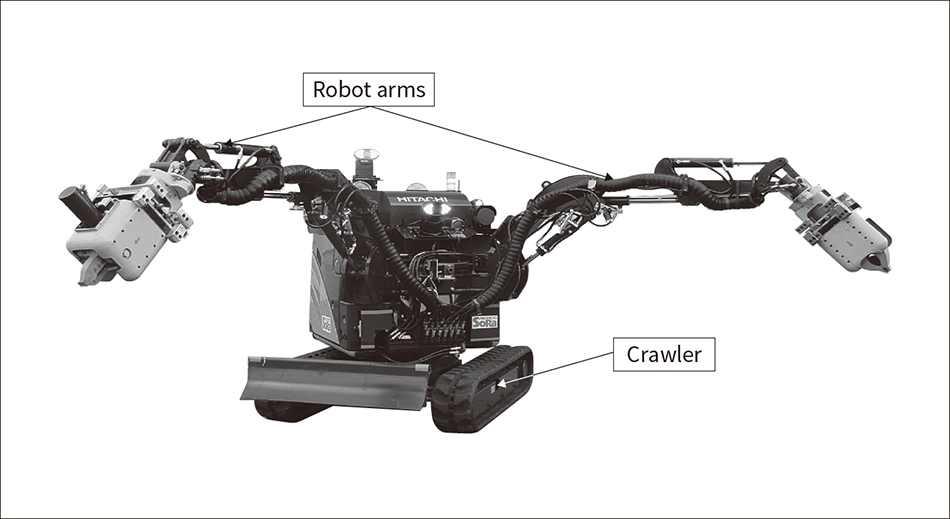 The robot is designed for heavy-duty work inside the building, with the tools attached to the ends of the robot arms able to be swapped remotely.
The robot is designed for heavy-duty work inside the building, with the tools attached to the ends of the robot arms able to be swapped remotely.
Figure 1 shows the ASTACO-SoRa dual-arm heavy machinery-type robot that the Hitachi Group has been developing and applying for nuclear disaster response(10). This robot features two arms on a compact chassis with a width of 980 mm, and enables a high level of freedom for working within the building. Also, the two arms can be raised to a height of approximately 2.5 m, and can lift 150 kg per arm, for a total weight of 300 kg. Furthermore, the ends of the arms can have grippers, cutting tools, rotating tools, long arms with cameras, and other parts that can be attached or detached to enable a wide range of tasks. By developing ASTACO-SoRa, the Hitachi Group has made it possible to use remote operations to remove concrete fragments and other debris from the high-radiation environment of the Fukushima Daiichi Nuclear Power Station.
The Hitachi Group has developed a “flexible robot” that avoids the use of sensors with low radiation resistance to enable use in a high-radiation environment. It combines an elastic structure with hydraulic cylinders and springs to deal with the risk of collisions during operations in a confined space so that no damage will occur even if the robot collides with another object or its surroundings(11). Figure 2 and Figure 3 show examples of operations by representative flexible four-legged robot arm and dual-arm types. Figure 2 shows operations inside a PCV during mockup testing. Capable of grabbing the beam above it and moving to any position, a single arm of the robot can be replaced with various tools, enabling it to efficiently carry out work. Figure 3 shows a mockup test with a dual-arm type robot removing fallen objects and other materials inside a pedestal, which is a cylindrical structure that supports the reactor pressure vessel. The robots are expected to an play active role when it comes to various aspects of fuel debris removal.
Figure 2 — Flexible Four-legged Robot Arm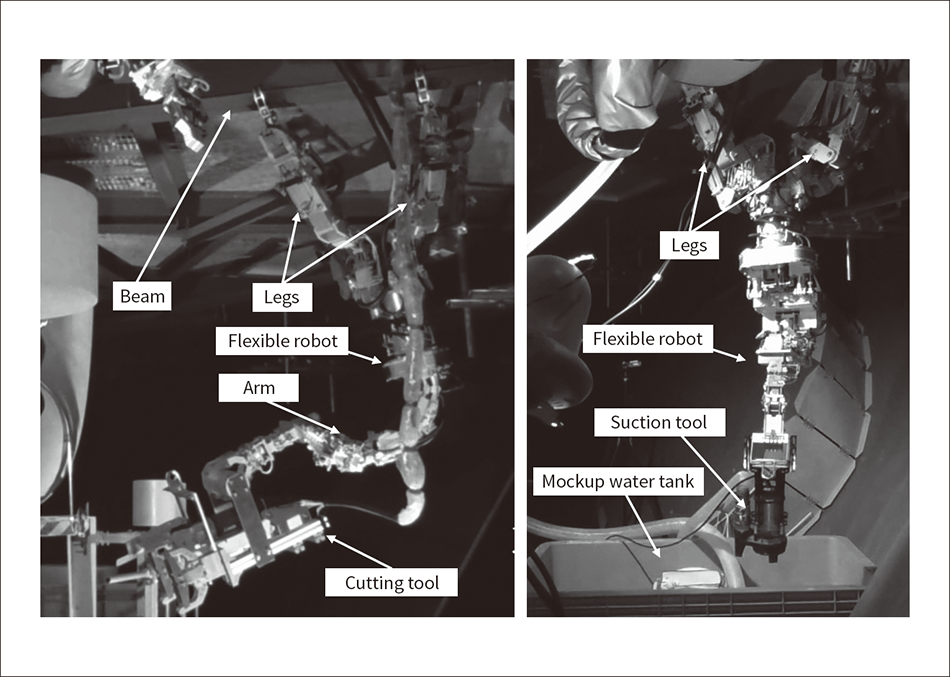 The robot arm can work in any location by gripping onto grating support beams by the four legs it uses for locomotion. The robot can perform a wide variety of tasks by swapping the tools attached to the end of its arm as required. The image on the left shows a cutting tool being used to remove an obstruction. The image on the right shows the arm installing a suction tool.
The robot arm can work in any location by gripping onto grating support beams by the four legs it uses for locomotion. The robot can perform a wide variety of tasks by swapping the tools attached to the end of its arm as required. The image on the left shows a cutting tool being used to remove an obstruction. The image on the right shows the arm installing a suction tool.
Figure 3 — Flexible Dual-Arm Robot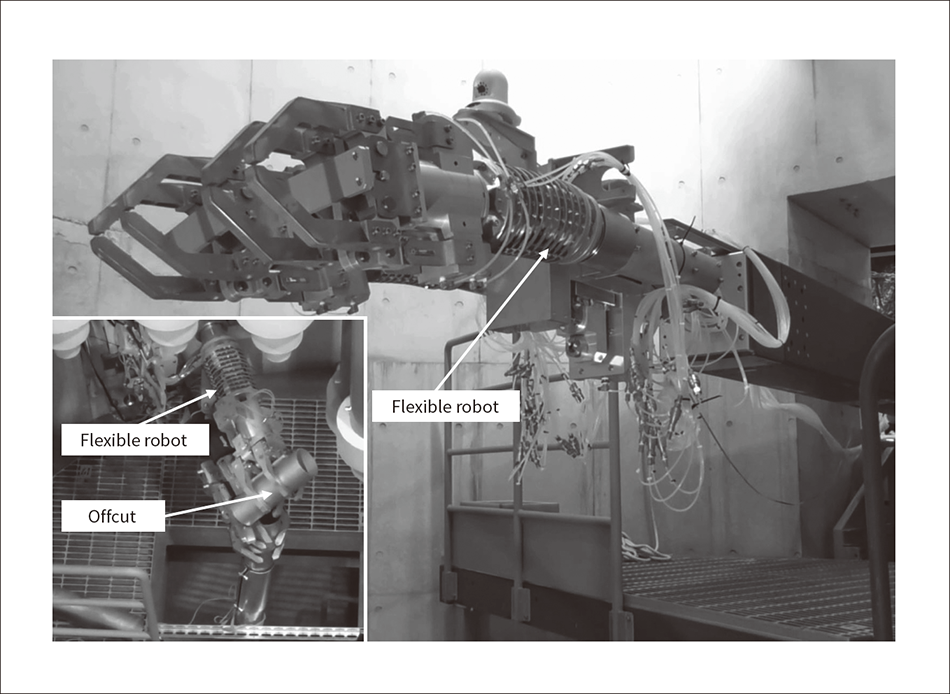 This robot is equipped with two flexible arms. The inset on the bottom-left shows how the robot can cut an object while holding it with both arms. In this way, demolition work can proceed by removing one of the held pieces after each cut.
This robot is equipped with two flexible arms. The inset on the bottom-left shows how the robot can cut an object while holding it with both arms. In this way, demolition work can proceed by removing one of the held pieces after each cut.
Figure 4 shows PMORPH-1, which was used in a first floor grating inspection (B1 inspection) that was carried out inside the Unit 1 PCV in April 2015(12). The image in (a) shows the shape when the robot is passing through a guide pipe, and (b) shows the shape when the robot is running over a grating while performing its inspection. PMORPH-1 includes a camera for use in inspections between the two crawlers. This camera faces forward with the robot in the shape of a C, and includes an up and down tilt mechanism that enables it to be used for visual inspection of the structural conditions inside the PCV. The robot also features a radiation dosimeter and a thermometer for use in inspecting the environment on top of the grating. This robot’s investigations not only made it possible to grasp the distribution of dose rates and temperatures, but also revealed a lack of major damage to existing structures(6).
Figure 5 shows PMORPH-2, which was used to inspect the underground floor in the Unit 1 PCV (B2 inspection) in March 2017(12). Unlike PMORPH-1, which has a camera that is used for inspections, PMORPH-2 has a mounted winch to lower the sensor unit down to the underground floor. The sensor unit itself includes a camera and a dosimeter. The inspection made it possible to grasp the state of fallen objects and deposits underground, and clearly showed how the dose rate increases closer to the floor surface(7).
Figure 4 — PMORPH-1 Shape-changing Robot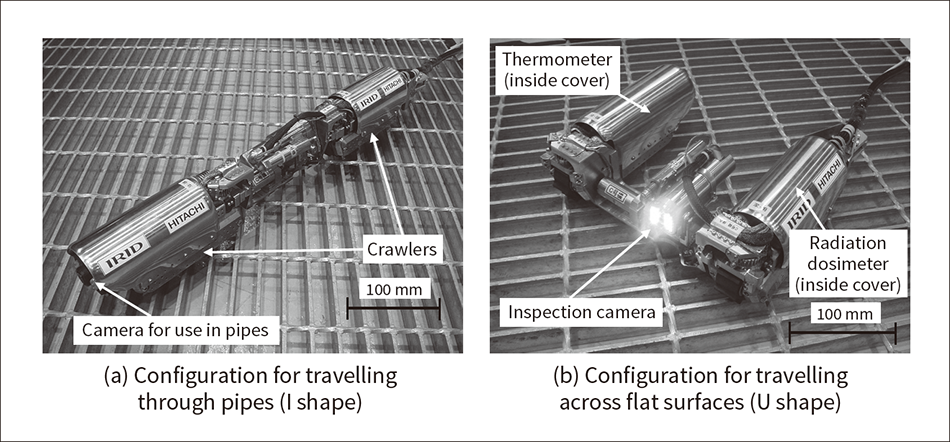 The robot can switch between two configurations for travelling through pipes and across flat surfaces respectively, thereby providing reliable ways for it to travel under different conditions.
The robot can switch between two configurations for travelling through pipes and across flat surfaces respectively, thereby providing reliable ways for it to travel under different conditions.
Figure 5 — PMORPH-2 Shape-changing Robot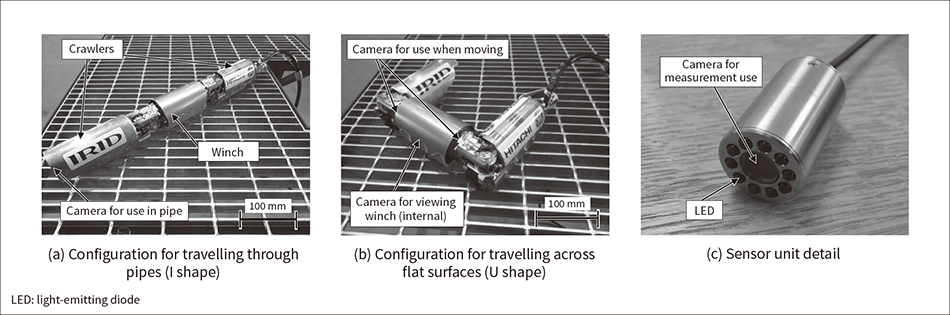 The survey scope was expanded by fitting a winch equipped with a sensor unit to the moving mechanism of the PMORPH-1.
The survey scope was expanded by fitting a winch equipped with a sensor unit to the moving mechanism of the PMORPH-1.
Since the bottom of the PCV and underground floor in the nuclear reactor building still contain fuel cooling water and groundwater due to the accident, the Hitachi Group developed boat-type submersible access devices to investigate the outside of the pedestal in the underground floor within the PCV(8). These devices are shown in Figure 6. The Hitachi Group has developed a total of six different remotely operated vehicles (ROVs), including five boat-type submersible access devices and one compact boat. ROV-A includes a function whereby it uses a guide ring to attach to underground structures with magnetism to prevent cables from being tangled on existing equipment. ROV-B includes a 3D deposit mapping function, ROV-C measures deposit thickness, ROV-D detects fuel debris, and ROV-E samples deposits. ROV-A2 is a compact boat device that enables the visual inspection of a wide area.
Figure 6 shows the lineup of ROV devices. ROV-B includes a scanning ultrasonic rangefinder and a water thermometer to map deposits in 3D, and is a device that acquires point cloud data from a wide area on the surface of deposits outside the pedestal. The ROV’s orientation is stabilized with anchors attached to the central base of the device, and the approximately 2-MHz ultrasonic rangefinder performs two-dimensional scanning by combining mechanical scanning of ±50° using a mechanical tilting mechanism with electronic scanning of ±50° orthogonally to the tilt direction, thereby achieving three-dimensional shape measurement.
In addition, ROV-C uses an approximately 100-kHz low‐frequency ultrasound sensor to measure the thickness of deposits outside the pedestal along with the height of the floor and fuel debris (a layer of chunks and powder with a high specific gravity) under the deposits.
ROV-D inspects the radiation particular to fuel debris, and includes radiation measuring instruments that can measure gamma rays to conduct nuclide analysis even under a radiation environment in excess of 10 Gy/h, while at the same time measuring neutron flux.
ROV-E uses a cylindrical sampling container with a diameter of approximately 60 mm, and includes a mechanism that samples small amounts of deposits (see Figure 7).
As a result of the inspections, the Hitachi Group successfully collected information pertaining to the formulation of a fuel debris removal plan, including how deposits have spread inside the PCV (inside and outside the pedestal), the state of radiation emissions, and so on.
Figure 6 — Lineup of Boat-type Submersible Access Devices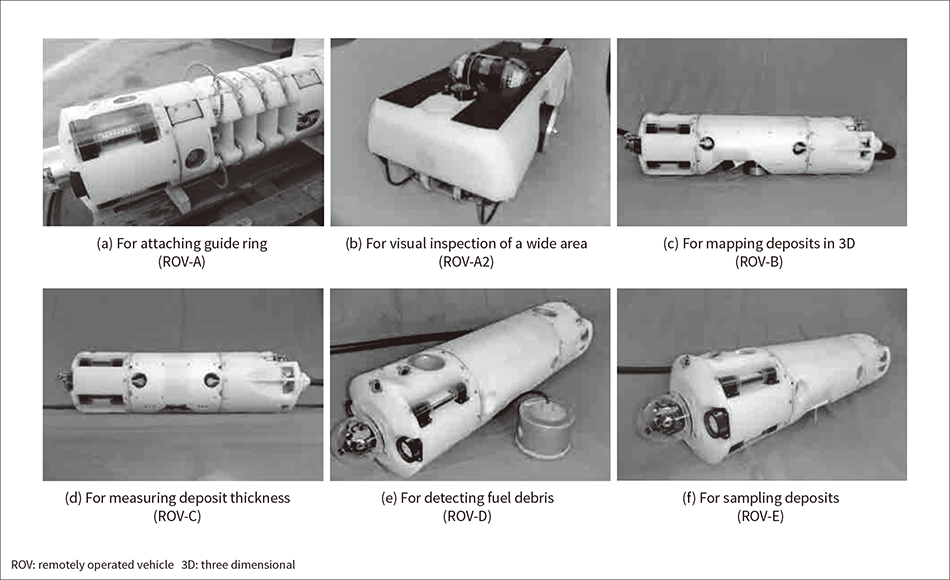 These boat-type submersible access devices can swim in the water while acquiring information regarding underground deposits with a variety of different measurement instruments. The device shown in (a) has a guide ring attached to guide cables while all ROVs navigate. Device (b) is a compact type for use in visual inspections that features enhanced mobility. Devices (c), (d), (e), and (f) have the functions of 3D mapping of deposits using ultrasound, measurement of deposit thickness using ultrasound, detecting fuel debris with a radiation detector, and sampling deposits, respectively.
These boat-type submersible access devices can swim in the water while acquiring information regarding underground deposits with a variety of different measurement instruments. The device shown in (a) has a guide ring attached to guide cables while all ROVs navigate. Device (b) is a compact type for use in visual inspections that features enhanced mobility. Devices (c), (d), (e), and (f) have the functions of 3D mapping of deposits using ultrasound, measurement of deposit thickness using ultrasound, detecting fuel debris with a radiation detector, and sampling deposits, respectively.
Figure 7 — Various Measurement Instruments included on Boat-type Submersible Access Devices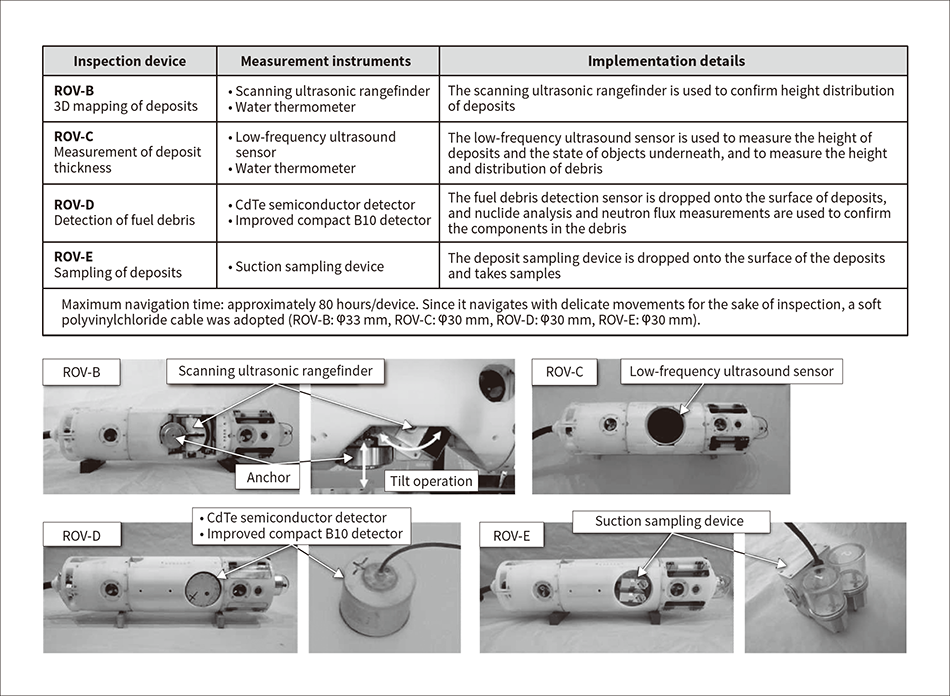 The boat-type submersible access devices acquire information regarding underground deposits with various types of measurement instruments that can be used while swimming underwater. Functions include the 3D mapping of deposits using ultrasound, the measurement of deposit thickness, the detection of fuel debris, and the sampling of deposits.
The boat-type submersible access devices acquire information regarding underground deposits with various types of measurement instruments that can be used while swimming underwater. Functions include the 3D mapping of deposits using ultrasound, the measurement of deposit thickness, the detection of fuel debris, and the sampling of deposits.
This article has described development work that the Hitachi Group has conducted up until this point as well as onsite progress in the Fukushima Daiichi Nuclear Power Station decommissioning project, including the main remotely operated equipment.
In terms of the state of progress, it covered countermeasures for dealing with contaminated water, the removal of fuel from the spent fuel pool, and the removal of fuel debris. It has also described the remotely operated equipment, including the ASTACO-SoRa dual-arm heavy machinery-type robot, flexible robot arms, PMORPH shape-changing robots, and boat-type submersible access devices, which can be used for a wide range of inspection activities underwater.
The Hitachi Group believes that these robots have successfully contributed to progress in decommissioning work, and will continue to develop technologies for use in decommissioning work over the long term.
The devices described in this article utilize robot technology developed by the Hitachi Group. Of these devices, the PMORPH shape-changing robots and boat-type submersible access devices were developed based on subsidies from the Agency for Natural Resources and Energy, including the FY2012 grants for the development of technologies for dealing with accidents at nuclear power reactors and other such facilities, FY2013 grants for the Technology Development Project of Decommissioning and Safety Technology, FY2013 to FY2018 supplementary budgets for the Project of Decommissioning and Contaminated Water Management, and others. The dual-arm flexible robots for use in operations inside a pedestal were developed as a project of the International Research Institute for Nuclear Decommissioning, with funding from the FY2016 supplementary budget for the Project of Decommissioning and Contaminated Water Management. In addition, the development of the ASTACO-SoRa dual-arm heavy machinery-type robot utilized technological know-how cultivated from the “Project for Strategic Development of Advanced Robotics Elemental Technologies,” which was commissioned by the New Energy and Industrial Technology Development Organization (NEDO) and carried out between FY2006 and FY2010. The authors would like to express their deepest gratitude to everyone involved.
