Realizing one-millisecond reflexive control by implementation of network control and deep learning processing on hardware
April 7, 2020
Hitachi has developed a high-speed controller system capable of reflexive operation control in response to external factors such as vibrations or collisions with humans. The developed controller system, which is small enough to be mounted in robots and other limited spaces, is made up of a tiny edge controller that executes operation control acquired through deep learning, a tiny I/O controller that performs input-output processing for sensors and motors, and a real-time network that connects these controllers. High-speed processing is made possible by implementing the hardware circuit inside the FPGA*1 mounted in each controller. The system has been demonstrated to be capable of responding to external factors within one millisecond. This enables minimizing size so that it can be implemented near sensors, motors, and other devices, as well as improving safety through reflexive operations in response to external factors. Going forward, Hitachi will leverage this technology for achieving autonomy of robots and other mechanical systems as part of efforts to contribute to addressing the worsening manpower shortage due to the declining birthrate and the aging population.
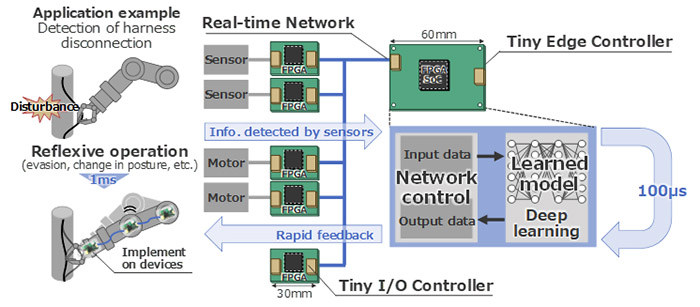
Fig. 1 Configuration of new controller system
Robotic systems have different input/output numbers depending on each application, and matching the maximum number unduly increases the controller size. Network-based robotic systems that have variable input/output number, however, are not capable of real-time processing due to network control delay. Hitachi therefore developed a simplified proprietary protocol for control operations and carried out hardware implementation of the network control for executing the protocol into each controller to realize real-time network processing. The I/O controller was also downsized by adopting a top-bottom, two-circuit-board configuration equipped with only the minimum necessary functions (Fig. 2, top: communication circuit board + bottom: I/O circuit board). The real-time network and tiny controllers make it possible to construct the most suitable system depending on the target applications.
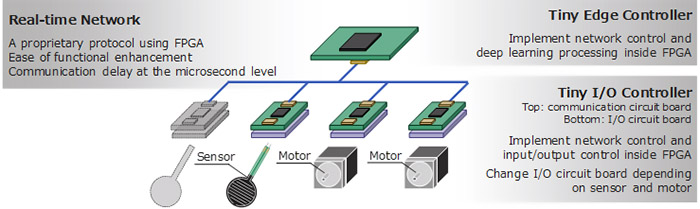
Fig. 2 Real-time network mechanism
Control processing based on deep learning requires performing more computations than processing based on conventional programming, making it difficult to achieve real-time performance in embedded CPUs mounted in robots and other devices. Hitachi therefore adopted a mechanism for cooperative control in both software (CPU) and hardware (FPGA) by mounting a single semiconductor chip (FPGA SoC*2) for the CPU and FPGA into the tiny edge controller. Newly developed integrated circuits for processing deep learning and for processing communications in the real-time network were mounted into the FPGA, with these integrated circuits being controlled from the software in the CPU. Real-time processing was achieved by adopting a configuration wherein the processing needed for reflexive operation control is carried out through high-speed feedback control using only hardware.
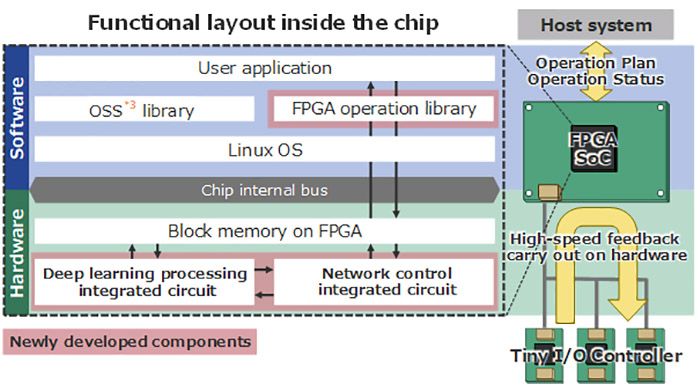
Fig. 3 Compact edge controller mechanism for software-hardware cooperative control
For more information, use the enquiry form below to contact the Research & Development Group, Hitachi, Ltd. Please make sure to include the title of the article.
