22 July 2020

Yashodeep Lonari
R&D Division, Hitachi America, Ltd.

Xunfei Zhou
R&D Division, Hitachi America, Ltd.

Subrata Kumar Kundu
R&D Division, Hitachi America, Ltd.
In recent years, digital transformation has emerged as a key growth driver in several business sectors. Companies are exploring new ways of working with customers and building new frameworks of digital and autonomous systems. Such a shift towards digital transformation is even more important in urban mobility, especially to overcome the challenges due to the COVID-19 pandemic. It is estimated that by the year 2050, nearly half of the revenue from the mobility sector (> $9,000 Billion in total) will be from digital services including smart, digital finance, and shared services [1]. The automotive industry is also adapting with this trend, North American automakers have begun to transition from their conventional role as a vehicle manufacturer to a digital system and service platform integrator, reshaping new products and services to end-users. In the past two decades, significant advancements in the area of sensing, control, high-speed computing and AI have led to development of autonomous vehicles that drive themselves without human intervention to bring benefits such as reduction of traffic accidents. However, autonomous vehicles that rely solely on on-board sensors have restrictions on sensing range and operating conditions. By integrating vehicle autonomy with connectivity significant improvement of performance can be achieved for self-driving connected car. Therefore, in this article, we summarize the concept of self-driving connected cars and Hitachi’s connected vehicle solutions that could bring the values of safety, efficiency, and comfort to the in-car experience.
Self-driving connected car or Connected Autonomous Vehicle (CAV) is potentially one of the most transformational technologies in the automotive industry. A completely self-driven car can only be built with the combination of revolutionary digital technologies such as Artificial Intelligence (AI) as well as state-of-the-art hardware including advanced sensors and high-performance processing units. Demonstrated in Fig. 1, a fully autonomous driving system relies either solely on AI or the combination of it with traditional algorithms to make decisions like a human driver on tasks such as perception, path planning, and control. Nevertheless, realizing such a fully autonomous driving system is a challenging task at this moment. Current autonomous vehicles could only allow partial autonomy under certain predefined operating conditions. While connectivity could provide additional useful information for both near-real-time and extend the vehicle’s information horizon beyond the on-board sensor range. Thus, the integration of Internet of Things (IoT) ensures the vehicle could safely drive themselves under any road conditions, types of weather, and is not bound to operate in a certain area. Moreover, the emergence of future smart cities [1] would be benefited from IoT-enabled CAVs, where driverless cars, trucks, and buses can be intrinsically connected into a CAV ecosystem, reduce traffic congestion and makes driving on roads safer.
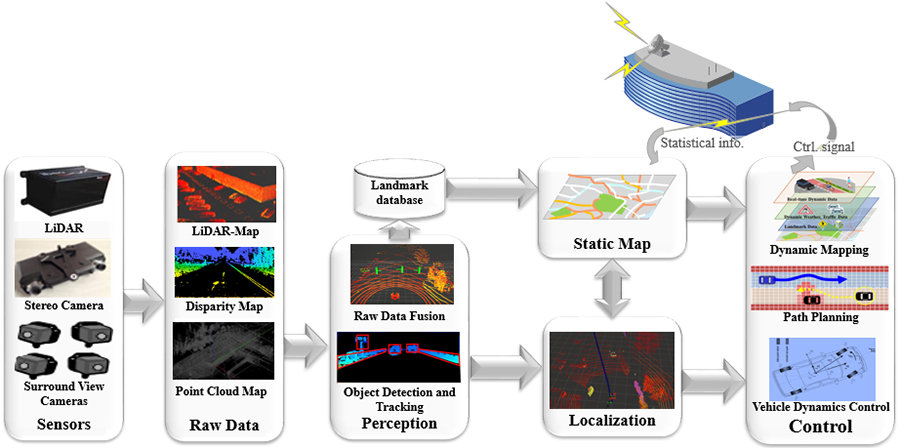
Figure 1: Architecture of an autonomous driving system
In future smart cities with numerous IoT-enable CAVs an effective IoT platform is essential for best functioning of connected vehicle ecosystem. Fig. 2 shows a schematic diagram of such an ecosystem. As shown in Fig. 2, vehicle components such as sensors, in-vehicle infotainment (IVI) module, and individual electronic control units (ECUs) like those of suspension and powertrain are all connected with a centralized ECU, which collects and processes the data as well as shares the data with IoT platform utilizing gateway and communication modules. From the IoT platform, data is exchanged between the smart city data center and 3rd party partners to increase the customer’s experience.
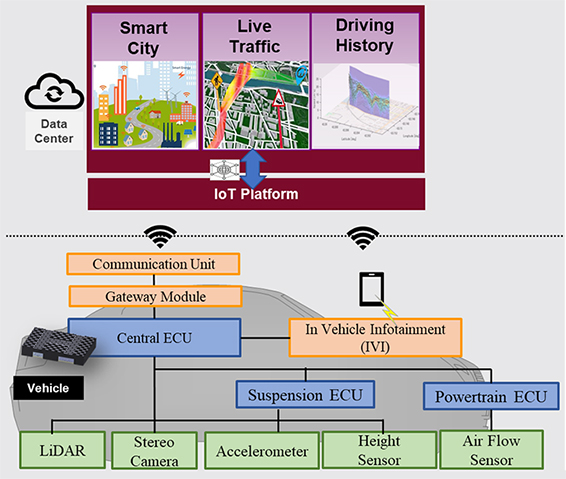
Figure 2: Architecture of a CAV ecosystem
Automotive Products Laboratory (APL) has been developing an IoT platform for CAV, utilizing this platform several vehicle applications to improve safety, efficiency and comfort of CAVs can be demonstrated. We have developed Drive Horizon application for efficiency improvement of connected powertrain in CAV [2]. The powertrain is the main component in a vehicle that generates power and transfers that power to the road surface. Without prior knowledge of the road surface and traffic information, the fuel efficiency of it is limited and a significant amount of energy is wasted by frequently changing speed. As shown in Fig. 3, each vehicle receiving connected data can be regarded as an IoT terminal and AI models are used to calculate the optimum speed for efficient driving. Such travel speed optimization and prediction are critical to gain efficiency improvements in predictive energy management of Electrified Vehicles (xEV). In xEVs, short-horizon (300m) speed prediction is used to control vehicle speed for minimizing unnecessary acceleration and braking. Whereas, long-horizon (1000m) speed prediction is used to optimally manage the charging of battery while ensuring engine functions in the most fuel-efficient operating conditions. In our work, accurate long horizon prediction was achieved by the combined use of vehicle sensors, maps, and real-time connected traffic data as the inputs to an AI model – Variational Neural Network (VNN). VNN is a generative model composed of an encoder layer, a latent space layer, and a decoder layer. In order to improve the interpretability of the AI model, the VNN output layer was further modified to jointly estimate vehicle speed and model uncertainty. Using predictive powertrain control with speed prediction enables fuel efficiency improvement by up to 5% subject to the road conditions [3, 4].
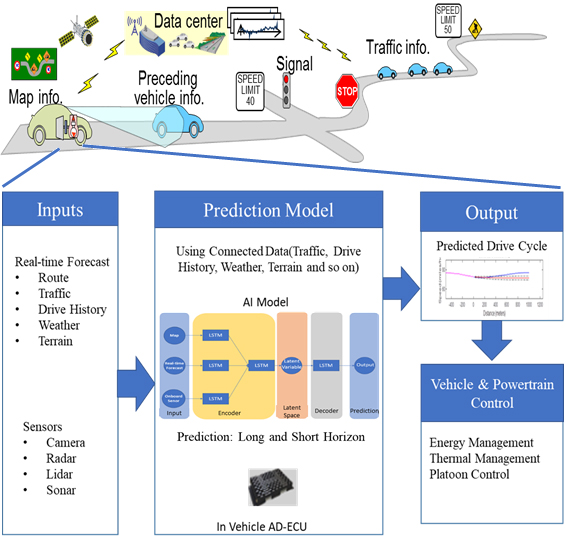
Figure 3: Architecture of Drive Horizon for vehicle energy efficiency
With regard to vehicle safety applications, Hitachi has also been developing other innovative technologies for CAVs, which includes the update of a digital map by automatic detection of road anomaly as well as control of suspension component using connected map data. As shown in a press release [5], with an advanced AI algorithm embedded inside of the stereo camera, road hazards such as pothole and road debris can be detected in real-time and shared with other vehicles. And once a vehicle receives the information of an imminent road hazard, a real-time warning could be sent to the driver via navigation system where speed and steering of the vehicle can be controlled automatically or suggestion can be provided to the human driver.
Apart from adopting AI and IoT to help control the vehicle, we have also been developing a solution to monitor drivers and occupants to help reach a more comfortable mobility experience [6]. As AI and IoT are deployed in real-world robots that interact with humans such as CAVs, it is critical to ensure efficient performance and safety of autonomous systems. Through our research, we intend to solve such research challenges for realizing the vision of the future smart city that could improve safety, efficiency, and comfort to society.
