25 August 2021

Subrata Kumar Kundu
R&D Division, Hitachi America, Ltd.
Mobility is a key sector where digitalization providing new opportunities in self-driving cars and connected mobility services. Innovative connected applications to increase operational efficiency and reduce the possibility of human driver error are beginning to emerge as the acceptance of autonomous vehicles increase, such as to reduce CO2 emission and traffic congestion, as well as improve safety and comfort. One of the key requirements for a connected vehicle ecosystem is an efficient data management platform that can process large amounts of real world heterogenous data in real time to identify current state as well as predict future states to deliver different types of services and applications [1]. To achieve such a system, we are developing a cloud based intelligent connected mobility platform FALCON®* that enables improved collaborative applications for connected autonomous vehicles.
Figure 1 shows a schematic diagram of FALCON® which allows seamless integration and fusion of heterogeneous data from multiple sources. As shown in Figure 1, a connected vehicle shares its information including vehicle ID, location, component specification, etc. using standard message formats (for example, MQTT) with FALCON® which also receives information from other sensors including a smart phone, infrastructure sensor, etc. Another important aspect of an efficient connected vehicle data management platform is for it to be applicable to cross-industry collaboration by providing fast, secure and reliable data exchange. FALCON® allows sharing information with other service providers including map, weather, traffic, OEM, supplier, Dept. of Transportation, etc. using blockchain technology to ensure a secure ecosystem. FALCON® processes the received data to derive value by using different AI modules categorized in different analytics layers, including descriptive, predictive, and prescriptive analytics as well as consists of database and data visualization interface. Descriptive analytics layer includes different modules including data decryption, authentication, filtering, fusion, hashing, etc. to thoroughly examine the current state using the data incoming from the connected vehicle as well as from the other sources. The analytics modules in the predictive layer includes prediction of route, speed, traffic, road anomaly, etc. to predict the future state of the connected vehicle for the entire route. The calculated features are then analyzed and optimized in the prescriptive layer to deliver value to the end users in different areas including safety, efficiency, and comfort. FALCON® is designed to realize rapid application creation using these modularized and interconnected data analytics modules. Moreover, it also allows the users (driver, fleet manager, traffic management authority, etc.) to monitor the current state of the connected vehicles as well as its predicted parameters using HMI, a cell phone app, and cloud portal. Currently available connected vehicle applications of FALCON® include safe and efficient routing, vehicle occupant monitoring, drive horizon, connected suspension control, etc.
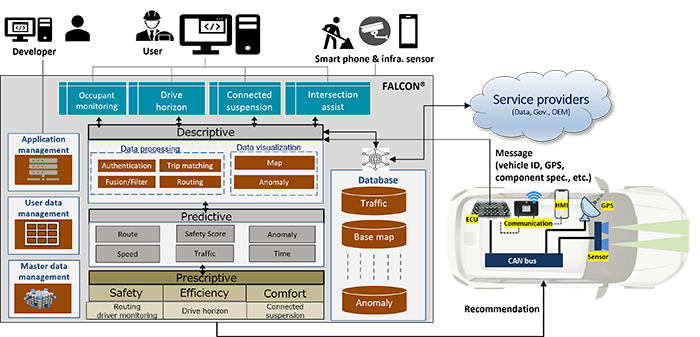
Figure 1: A schematic diagram of FALCON®.
Safe and efficient routing of an autonomous vehicle is one of the key applications of FALCON®. Conventional navigation solutions make driving more fuel and time efficient which can significantly help to reduce emission and congestion [2]. However, existing solutions cannot ensure the safety of a fully or partially autonomous vehicle by selecting a best route. To ensure the safety of an automated vehicle, it’s always desirable to maximize the amount of automated driving time to avoid possibility of collision due to the human driver errors. At the beginning of any trip, it is important to identify the best route that maximizes the amount of autonomous driving time. Thus, a safe and efficient routing application to ensure the safety of an autonomous vehicle has been developed using FALCON® platform. Figure 2 shows a flowchart to select an optimal route for an autonomous vehicle. As shown in Figure 2, once FALCON® receives the vehicle info, it processes the information and identify onboard sensors range and field of view. Consecutively, it calculates required field of view for every waypoint of candidates’ routes and corresponding safety scores. Fuel efficiency and time for each candidate routes are also calculated. Finally, optimization algorithm determines an optimal safe and fuel-efficient route of the connected autonomous vehicle.
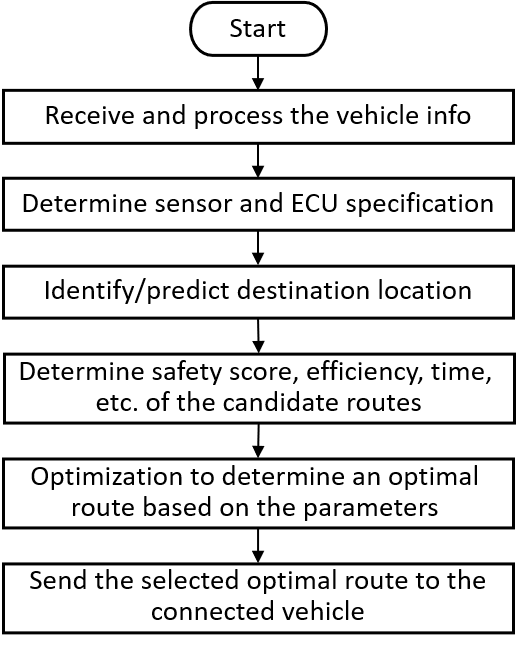
Figure 2: A simplified flowchart to select safe and fuel-efficient route of a connected autonomous vehicle considering onboard sensors specification and road condition.
Driver inattention and drowsiness are the leading causes of motor vehicle accidents worldwide. Condition autonomous driving (Level-3) also requires driver’s attention to monitor the safety critical functions of the vehicle and take control in case of any system error. The vehicle occupant monitoring application of FALCON® makes it possible to monitor and predict the driver’s wellness state and send recommendation using HMI notifications. Once a vehicle is connected to FALCON®, facial features are received from in-vehicle camera and processed to analyze driver drowsiness, distraction, emotion, stress level, as well as to predict risk factors and consecutively send necessary recommendations to the driver [3][4]. Connected suspension control is another application that provides increased comfort to passengers by providing advance notification and automatic control of the suspension system parameters to avoid any effects due to road anomalies [5]. Figures 3(a) and (b) show examples of cell phone app notifications sent to the driver when FALCON® detects driver drowsiness and road anomalies. Moreover, cloud portal allows users (fleet manager, traffic manager, etc.) to monitor vehicle’s current state and necessary performance metrics as shown in Figure 3(c). The Drive Horizon [5] and Intersection Assist applications of FALCON® recommend to the driver the best speed during the route to improve the fuel or battery efficiency and the best lane for the vehicle in advance for an upcoming intersection to avoid traffic congestion, respectively.
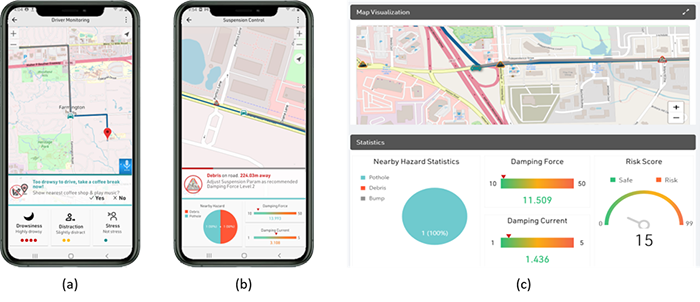
Figure 3: Cell phone apps shows recommendations once (a) drowsiness and (b) road anomalies are detected. (c) Cloud portal allows users to monitor vehicle state and necessary information.
Given recent technological advancements as well as favorable government policies/incentives, there’s been a rise in EV adoption and connected mobility services to realize a carbon-free, accident-free society. Our research scope also includes fast and secured data exchange as well as efficient operation of electric vehicles. Reliable data is the backbone of any smart, connected ecosystem ― whether that system is a car, a mass transit vehicle, or an entire network of transportation modes. FALCON® is one possible technology solution that offers significant benefits in this domain while also focusing on Hitachi’s target of realizing a safer, cleaner, and congestion-free society for future smart cities.
The author would like to thank Yashodeep Lonari, Xiaoliang Zhu, Naveenkumar Bengaloreramaiah, and Harsha Badarinarayan for their support in this research project.
* FALCON® is a registered trademark of Hitachi America, Ltd. in the United States of America.
