19 November 2021

Nobuo Namura
Research & Development Group, Hitachi, Ltd.
To achieve sustainable societies with renewable energies, their lifecycle costs are one of the biggest concerns. A previous article by my colleagues and I presented a digital twin for wind turbine monitoring to reduce the cost of wind energy. In this blog, I’d like to show how we are applying the digital twin to a real wind turbine of the Fukushima Floating Offshore Wind Farm Demonstration Project [1] and explain how monitoring results can be used for lifetime extension and condition-based maintenance (CBM).
The lifetime of a wind turbine is greatly influenced by the wind conditions at the wind farm where the turbine is installed. Additionally, the lifetime of turbines located at the same wind farm may differ from each other due to local terrain around each turbine and interaction with the other turbines. When the wind condition that faced by the turbine is less severe than a design condition, the lifetime of the turbine can be extended by monitoring lifetime consumption (fatigue damage) of turbine components such as blades, tower, nacelle, shaft, gearbox, generator, etc. Lifetime variations also appear in wear-out parts. Typical time-based maintenance (TBM) periodically replaces components that wear out in predefined time spans whereas in CBM, the cost of maintenance and replacement parts can be reduced as maintenance periods of the wear-out parts are based on the condition of each turbine which varies from one turbine to another.
CBM of the wind turbine is usually conducted by monitoring vibration at many points on each component with dedicated sensors. Simply increasing the number of monitored points and components leads to an increase in monitoring cost. In our approach, the digital twin acts as virtual sensors for monitoring any component whose behavior can be simulated from a smaller number of sensors as input to the digital twin. Thus, CBM with the digital twin contributes to identifying critical turbines, components, and positions that need maintenance (Figure 1).
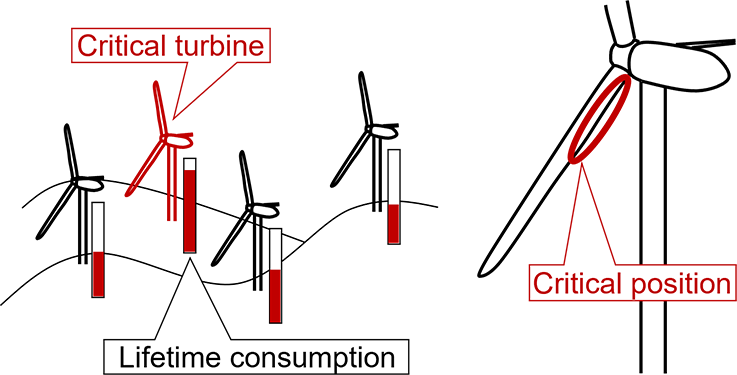
Figure 1. Identification of critical wind turbines and positions with CBM
My colleagues and I proposed a digital twin constructed for wind turbine blades and which reproduced their behavior (Figure 2). The digital twin consists of two main parts: a physics model and Kalman filter (KF). The physics model can estimate entire blade behavior from wind and operational conditions measured in the wind turbine. In Figure 2, the wind speed is a typical input for the physics model. The estimation without KF shows timeseries of estimated strain at a validation position on the blade, where strain sensor was installed. However, the estimation without KF cannot reproduce complicated blade vibration observed by the measurement. The proposed digital twin improves estimation accuracy by coupling KF with the physics model. KF corrects estimated behavior of the entire blade with load measurement only at the blade root. The estimation with KF shows the strain timeseries corrected by blade root moments through KF and is comparable to the measurement.
Figure 2. Blade behavior reproduced by the digital twin
Lifetime consumption is computable as fatigue damage by using results of continuous behavior monitoring. We computed fatigue damage of structural components in the blade: glass fiber reinforced plastics (GFRP) at representative three positions and connection bolts at the blade root. Figure 3 shows monthly accumulation of fatigue damage computed from strain estimation and measurement in August 2016. Comparing fatigue damage at the validation position (Figure 3(a)) shows that the estimation of the digital twin successfully reproduced the measurement. Additionally, the digital twin can estimate different accumulation trends at four positions (Figure 3(a-d)) with a small number of sensors. Comparing the fatigue damage at various positions on many wind turbines in the farm tells us critical positions and turbines for CBM as shown in Figure 1. If the fatigue damage accumulation after the design lifetime is smaller than the design assumption, the lifetime can be extended.
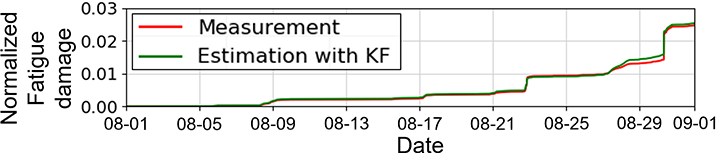
(a) Monthly accumulation on GFRP at the validation position
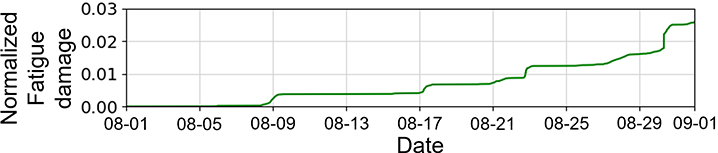
(b) Monthly accumulation on GFRP at the spar cap
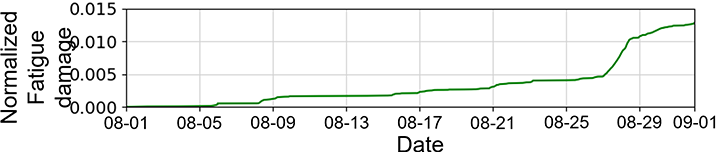
(c) Monthly accumulation on GFRP at the trailing edge panel
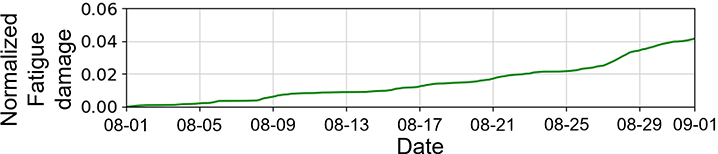
(d) Monthly accumulation on the connection bolt
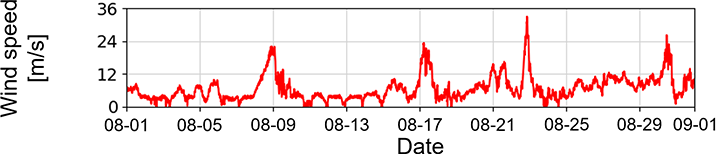
(e) Mean wind speed for 10 minutes
Figure 3. Fatigue damage accumulation at four positions on a blade and wind speed variation in August 2016
For more details, we encourage you to read our paper.[2]
This study was carried out as a part of the Fukushima Floating Offshore Wind Farm Demonstration Project (Fukushima FORWARD) funded by the Ministry of Economy, Trade and Industry (METI), Japan. The authors wish to express their deepest gratitude to the concerned parties for their assistance during this study.
