11 November 2021

Yashodeep Lonari
R&D Division, Hitachi America, Ltd.
Over the last couple of decades, we have seen significant technological advancements in machine learning, sensing, Internet-of-Things (IoT) due to interdisciplinary developments coming together from separate fields of artificial intelligence (AI), robotics, connectivity, etc. These tremendous technological advancements are enabling autonomous systems to operate in real world dynamic environments in the form of autonomous vehicles, autonomous marine robots, and so forth, and autonomous vehicles are expected to change the mobility landscape by safely and efficiently moving people and goods in the shortest time, with low energy consumption and low emissions. Additionally, integrating connectivity with vehicle autonomy will enable us to realize connected autonomous vehicles (CAVs). Such CAVs promise further improvements in safety, comfort and resource efficiency by enabling congestion free traffic routing, increased vehicle safety, reduced fuel consumption, as well as increased drive range by intelligent control of the powertrain.
To help realize this vision of a safer, more environmentally kind and comfortable mobility, my colleagues and I are focusing on how to improve the energy efficiency of the powertrain in CAVs using connected data, as the market shares of CAVs and electric vehicle (EV) powertrains are projected to grow globally from USD 8 billion to 66 billion, USD 47 billion to 568 billion by 2035, respectively [1, 2] and energy efficiency of powertrain will become a key issue.
One of the prerequisites in improving CAV efficiency is the ability to accurately predict driving speed [1]. We developed an AI based approach which we named, “Drive Horizon,” where data from onboard sensors as well as connected data, are processed using AI-based predictive control to improve vehicle efficiency. Drive Horizon can also be effectively applied to internal combustion engines (ICE) as well as to hybrid or fully electric powertrains.
For example, let me explain how this works with a hybrid powertrain that consists of two sources of energy – ICE and electric battery. As shown in Figure 1, the power flow from the ICE and battery needs to be managed based on the driving situation, e.g., acceleration assist, regenerative braking etc. Thus, we need to be able to predict the vehicle’s future speed to improve the efficiency of hybrid powertrain. A vehicle’s speed prediction can be roughly divided into two categories – “short-term” and “long-term” predictions. As shown in Figure 2, idealized speed prediction for long term that has perfect accuracy gives the highest efficiency improvement of 6-8% [3]. In reality, however, due to the uncertain behavior of those on the road and changing weather conditions, predicting the future speed of vehicles is quite a challenging task. We therefore decided that we would focus on developing a “long-term” prediction technique using a combination of onboard sensors and real-time traffic data.
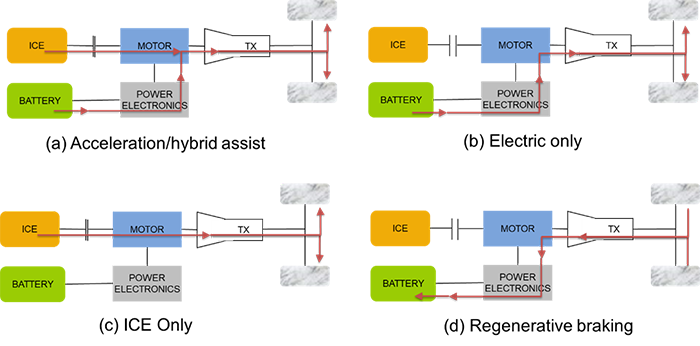
Figure 1. Electrified vehicle powertrain schematic
![Figure 2. Energy saving percentage using speed prediction for hybrid-electrified powertrain [3]](image/fig2.png)
Figure 2. Energy saving percentage using speed prediction for hybrid-electrified powertrain [3]
Figure 3 shows a schematic diagram of the technique we developed using variation neural network (VNN) that uses map, real-time traffic data, and vehicle speed as inputs and outputs the predicted speed. The model is composed of an encoder layer, latent space layer and decoder layer. The encoder layer converts the inputs of map, traffic and vehicle speed to latent space. The latent space learns the approximate statistical distribution of the input data by tuning neural network weights. Based on the statistical distribution of the latent space, decoder layer outputs speed prediction for next 1 kilometer. Since, the calculation of model uncertainty is essential for the robust control of vehicle and powertrain, the VNN output layer was modified to estimate vehicle speed and uncertainty together. We used a Ford F-250 vehicle which was instrumented as shown in Figure 4, to capture different drivers’ vehicle speeds, traffic and map data which we then consecutively used to train the VNN model. The detailed experimental setup is explained in our previous study [4].
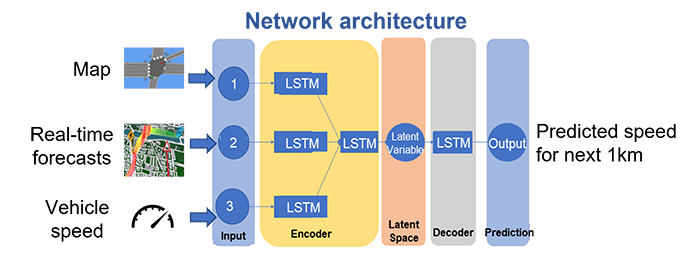
Figure 3. Variational neural network model for speed prediction
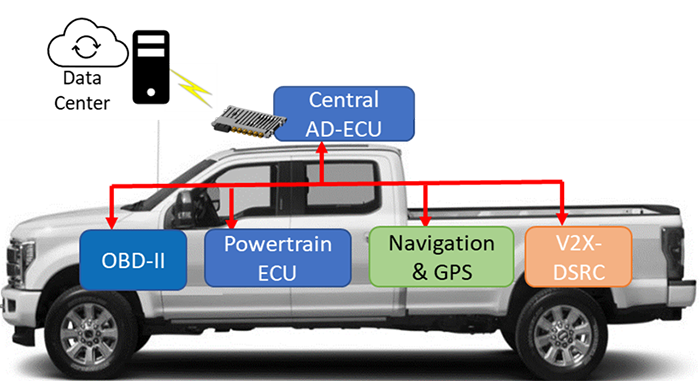
Figure 4. Experimental vehicle set-up
The effectiveness of the developed model was evaluated by using mean average error (MAE) between the model’s predicted speed and ground truth vehicle speed as an accuracy metric. PC-based simulation was then conducted to confirm that the developed model accurately predicted speed from the test datasets. The VNN model was able to generalize on unseen routes in test data and predict vehicle speed with a good accuracy of MAE~=2 mph. As we were able to obtain a satisfactory accuracy from the model with the test data, we then decided to evaluate our VNN model in a connected vehicle experiment. The experimental results showed that the model has a good accuracy of MAE~=5 mph, while increasing the prediction range to 1 kilometer. We found that the increase of MAE between PC simulation and experimental results could be attributed to sources of uncertainty in real-world vehicle operation arising from latency of real-time traffic update, network packet drops etc. (For additional details of our speed prediction results, we encourage you to read our paper [4].)
AI-based prediction models are being rapidly adopted in real-world autonomous systems such as autonomous vehicles. Estimating these AI model’s prediction uncertainty will be critical to guarantee efficient performance and safety of autonomous vehicle. Through our experiments and in the published paper, we demonstrated how the AI-based approach of Drive Horizon can be used in real-world deployment for connected vehicle to predict future vehicle speed along with model uncertainty.
The author would like to thank co-authors Subrata Kundu, Mitesh Agrawal, and Sunny Bellary for their contribution in this research work.
