Industrial robots have long been used at manufacturing sites. Such robots are good at performing simple tasks accurately, but weak in carrying out complicated work or adapting to sudden changes in circumstances. Trying to have robots conduct difficult tasks will result in loss of both time and money.
So, how can we utilize robots in a way in which they can adjust to changes in product types and production volumes, so that we can manufacture products at low cost? Hitachi has addressed this issue with its proprietary "flexible production system utilizing human and robot cooperation."
With a tactful division of labor between humans and robots, the system can flexibly and promptly respond to a high-mix variable-volume production and reduces production costs.

KAJITA Daiki
Researcher

NAKASU Nobuaki
Senior Researcher
(Publication: May 29, 2017)
NAKASUHumans can put even complicated things together dexterously. In contrast, robots can perform simple tasks accurately. The flexible production system utilizing human and robot cooperation combines these characteristics to enable the efficient production of a variety of products.
In recent years, manufacturers like ourselves have been required to conduct "high-mix variable-volume production" to match increasingly diversified consumer tastes, requiring the manufacture of various types of products in limited numbers in accordance with the circumstances. Moreover, as products quickly become outdated, it is necessary to flexibly change the production lines in a short period of time to meet the product life cycle. Solely relying on robots that are good at mass production through simple tasks results in no longer being able to satisfy such needs.
KAJITATo begin with, there are tasks that are too difficult for robots to perform. An example of this is electric wiring. Electric wires are limp and bend easily, and never stay in the same condition when they are held by robots. Therefore, robots should conduct complicated processing, such as observing the tips of the electric wires by themselves while holding them and determining which action to take in accordance with the wire conditions. Assigning robots to perform such complicated tasks, would lead to high equipment costs.
In that case, how about letting human workers perform such tasks not suitable for robots? Humans would be able to do the job more quickly and less expensively than robots. This clear-cut thinking formed the basis of the "flexible production system utilizing human and robot cooperation."
NAKASUOther companies also started to take the approach of "letting human workers do difficult tasks" in the past year or two, but we began our endeavors four years ago. At that time, this thinking was quite advanced.
NAKASUThe three-dimensional computer-aided design (3D-CAD) data for products and facilities and such manufacturing criteria as labor costs and production plans are used as inputs. Then, the system automatically generates information needed for production in a comprehensive manner. It is composed of four elemental technologies — generation of: assembly sequence, line configuration, robot operations and manned tasks. Of these technologies, we were engaged in particular in generation of line configuration and robot operations.
Figure 1: Overview of the flexible production system utilizing human and robot cooperation
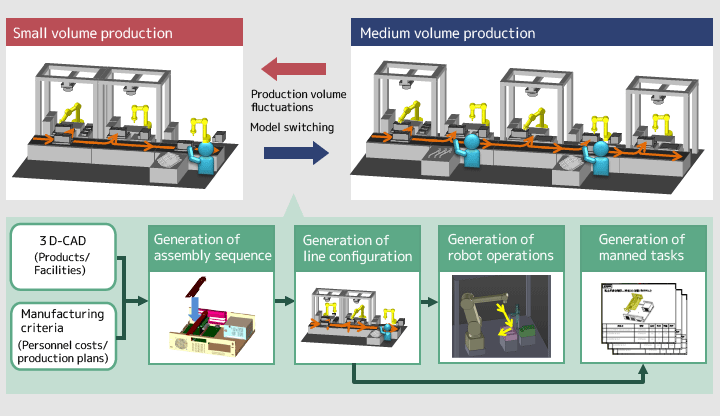
NAKASUCertainly. "Generation of line configuration" is a technique to automatically generate line configuration, such as how many robots are installed and what operations they should perform, and how many people are required to do what. It makes a comprehensive judgment as to how much labor costs will be, how difficult the operations are, and which of the two — humans or robots — can perform the operations less expensively. The line configuration varies depending on the country in which the plant is located, because labor costs and worker skills are different in each country and the technology takes into account such variations. By using this technology, you can optimize the proportion of human workers and robots in accordance with a change in production volume, leading to a cost reduction for the entire production line.

NAKASUTo put it simply, the technology automatically generates operations to be performed by robots, based on the 3D-CAD data of the products and facilities.
Robots operate in accordance with programs. To prepare the programs, information is required on the action of robots, such as where and how robot arms move. A common method to input such information is "online teaching." A device called "teaching pendant" is used to input the information while robots are operating. Indeed, this "online teaching" is quite tough.
KAJITAFor example, when assembling even a selection of components, the robot arm first moves to the position above the component, goes down and holds the components. Then, the arm goes up again while holding the components, and moves to the place where assembly is conducted. It then goes down to set the component into where it must be fitted in. The arm then detaches the component and moves up. To instruct a robot to perform this task, you have to input all the points the robot arm passes for each action. Because a product is made of hundreds of components, it takes tremendous time to input such positions one by one manually. In addition, when a product undergoes minor changes, some components are replaced with different ones. Then we must input the relevant data once again to tailor to such new components.
What is more, although I simply said that the robot arm goes up while holding the components, how high should the arm bring the component, and at what speed should it place the component? Such types of information are inputted by people at the production site, according to their hunches and experiences. However, this method causes differences in the information according to who inputs it, and accordingly in the accuracy of the robot operations.
In order to address this issue, we have developed the technology to automatically generate information, which had been inputted manually, by using what is called the 3D-CAD data. With this technology, we create the 3D-CAD, or something like a prototype of a product, at the product design stage. As the data is three-dimensional, it includes information on location of components and in which direction they are placed. Our technology analyzes such information and uses the results as inputs for the programs of robot operations.
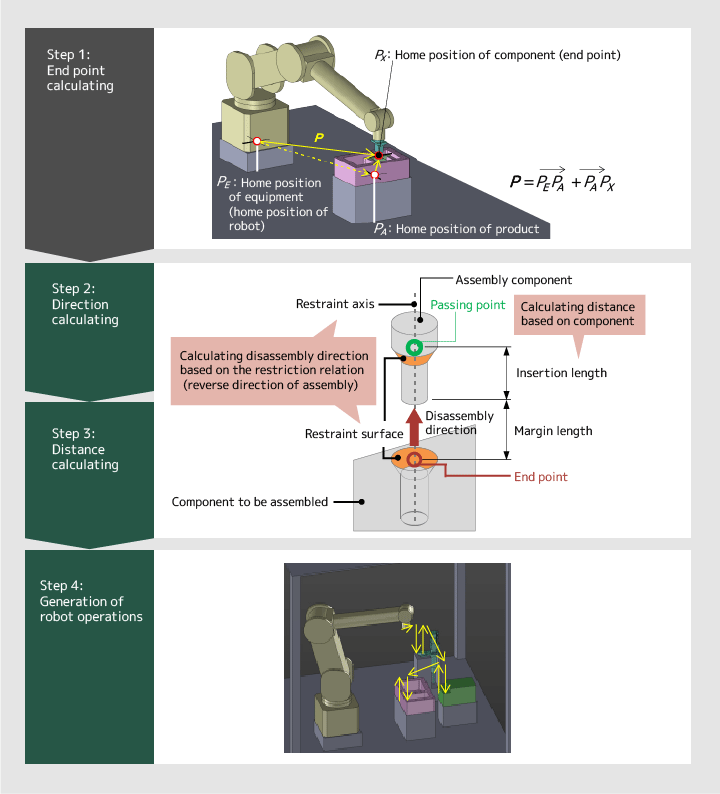
NAKASUWe tested the technology for a product that is composed of 150 components. While conventional online teaching required 49 hours to do the job, our technology automatically generated the information in 7 hours. With this technology, it is expected that time required for the process is significantly reduced and robot programs can be prepared without having to rely on workers' experiences.
Figure 2: Flow of generation of robot operations

KAJITAIn parallel with the generation of robot operations, we worked to determine the design rules of products, which I believe was essential.
Like the case of electric wiring I mentioned before, there are operations that robots are not good at in the first place. Nevertheless, if robots cannot do many of the operations, human workers have to do almost everything. That raises labor costs, and thus increases the cost of manufacturing products.
Therefore, we reviewed product design and determined the design rules of products so that robots can be used for their production. The design rules indicate the design guidelines in cases where certain facilities or robots are used. This also provided an advantage that designers can design more easily.
Once the product design is made according to the rules to facilitate using robots for the assembly, the technology for generation of robot operations works more effectively. This has taught me that we need to focus on using robots and reviewing product design simultaneously.
NAKASUIt is easy to talk about changing how to design, but it is no easy task to actually do it. So Mr. Kajita explained its importance tenaciously, and people at the manufacturing sites gradually accepted the changes.
NAKASUYou are right. The production lines are built based on elementary technologies, and products are manufactured on the actual sites. This is what I find interesting and rewarding in my job. Not just research, but we need to refine the facilities that can be actually used for mass production. I believe this is the best part of the work I am engaged in.
KAJITAMr. Nakasu and I had initially belonged to departments in charge of research that is more oriented to physical products, and were moved to the current department. In my view, we are now in a department that is exactly engaged in "cyber physical." This is a key word that has attracted attention in recent years, and means endeavors to fuse computers and the reality. What we calculate in the cyber space is applied to robots, or the real space, and let them actually manufacture products. It is a field of focused attention, and we can actually check how robots move according to the calculation results. This is really interesting.
KAJITAThe technology for generation of line configuration provides us the optimal production line configuration. So we need to prepare robots only in the required number. It seems this is a reason why the system was accepted. If we successfully receive an order for a certain product, we often cannot tell whether the product will be mass produced going forward, as the economy is not necessarily good these days. So people at the manufacturing sites want to reduce initial investment in facilities as much as possible. The flexible production system utilizing human and robot cooperation has successfully satisfied such a requirement, and I surely feel it from internal responses.

NAKASUWith the system, you do not need dedicated robots, and can do with what is sold as "industrial robots" in general. I think this was another advantage for the manufacturing sites. If specific robots were required, the system would not be applied readily and widely.
KAJITAHitachi itself does not produce industrial robots. So the customers outside the company may wonder what Hitachi would do with robots. Going forward, I would like to proactively provide information on this system through presentations at academic conferences and technical papers, etc., so that our customers would recognize it. On top of such an effort, we will repeatedly discuss with the customers and develop this field together with them. That's what I hope to achieve.
KAJITAAt present, robots are mainly used for material handling, which is a patterned operation of bringing components from position A to position B. You may want to change the robot programs and let them do other operations, but that has hardly been realized. We have started research to realize that robots would take different actions each time in accordance with the circumstances through the production line. For that, the robot's operations must be automatically generated each time an object arrives. So the point is how quickly calculations are made.

Moreover, in order to check if the calculation results are correct, we actually use machines at present. But this requires human judgment and takes time. So I believe it should be possible, as a method, to use AI to judge the calculation results and accumulate success and failure data, so that robots would think by themselves how to perform correctly. However, if we said "robots automatically learn and perform well," some people might feel uneasy. If we employ AI, we would also have to consider how to ensure security and reliability.
NAKASUI think robots would be applied not only at plants but in wider areas. Going forward, we might see robots working at convenience stores. I wish robots could be developed that leave production floors and work nearer to people's lives.


