Technological Innovations Accelerating Worldwide Digitalization
Across a multitude of industries, against the backdrop of the diversification of end-user needs and a labor shortage, there is a requirement for automation that can handle advanced work demands and changes in that work. Hitachi is advocating the concept of an “autonomous and collaborative robot system,” which achieves automation that combines flexibility and efficiency by allowing multiple intelligent robots to move autonomously and collaborate together smartly. This article describes the fundamentals of that concept, and introduces a case example, for a distribution warehouse, and an example operation using an actual robot system.

Center for Technology Innovation – Digital Technology, Research & Development Group, Hitachi, Ltd. Current work and research: Research and development management of computer vision, AI, and robotics. Society memberships: IEEE, the Institute of Electronics, Information and Communication Engineers (IEICE), and the Information Processing Society of Japan (IPSJ).

Intelligent Information Research Department, Center for Technology Innovation – Digital Technology, Research & Development Group, Hitachi, Ltd. Current work and research: Research and development of robotics systems and AI. Society memberships: IEICE and the Robotics Society of Japan (RSJ).

Intelligent Information Research Department, Center for Technology Innovation – Digital Technology, Research & Development Group, Hitachi, Ltd. Current work and research: Research and development of automation and big data analysis for logistics and distribution. Society memberships: IPSJ and the Japanese Society for Artificial Intelligence (JSAI).

Smart Logistics Development Department, Logistics Solution Business Development Headquarters, Hitachi Transport System, Ltd. Current work and research: Development of innovative logistics systems. Society memberships: IEEE and IEICE.
Across various industrial fields, manufacturing, logistics, distribution, transportation, construction, and civil engineering, etc., in response to societal challenges, such as a labor shortage and working style reforms, there is a need for a detailed response to increasingly sophisticated end-user needs that are constantly changing. Dealing with these restrictions and requirements is not only a problem that each business operator should solve, but also an opportunity for innovation that creates new value.
The key to achieving such innovation is intelligent automation of work tasks that incorporates robots and artificial intelligence (AI). Hitachi, in its role as a partner for innovation, intends to develop a business that provides this automation functionality across a wide area, from components to systems and services. As such, it is engaged in the research and development of numerous technologies that will be required.
This article describes the concept of an “autonomous and collaborative robot system” and outlines concrete examples.
The value of automation in the industrial sector can be seen as the ability to carry out work tasks with performance and functionality that exceeds manual limits by explicitly introducing various technologies into the workplace. Moreover, one major feature of automation is that the possibilities for enhancements in its performance and functionality are endless as technology continues to develop. This is expected to be a vitally important point in the coming era of accelerating technological innovation.
What's more, in workplaces these days, technology is required to adaptively perform a variety of tasks, not just repetitive regular tasks. Looking at product life-cycle, more than half of electrical products, for example, are said to reach the end of their useful life within five years, and there are reports that this is becoming shorter(1). Consequently, assuming the same work model is continued over the long term, this will become a major limitation in business development. Moreover, in electronic commerce (EC) warehouse operations, for which there is rapid market growth, as can be easily imagined from the millions of products handled by large corporations in this sector, it is necessary to handle an extremely wide variety of goods that are different shapes and colors and are constantly being replaced.
Because of this, there will be a strong demand for future automation that has the ability to adjust performance, function, and configuration, etc. over time, and to flexibly adapt to continually changing and diversifying business environments and customer requirements.
Automation with a focus on the above capabilities will be referred to as “evolutionary automation.” The development of the technology described below is aimed at achieving this evolutionary automation across a wide range of industries.
The intelligence and autonomy of machines plays a pivotal role in the quest to achieve evolutionary automation. Under the recent rapid development of AI technology, the development of intelligent machines from both academic and practical perspectives, that is to say, robots, is thriving. Just how important robots are to evolutionary automation goes without saying. It is important to note here, however, that they are essential not only for replacing individual tasks with machines and advancing efficiency, but also from the perspective of industrial applications, in terms of transforming whole businesses into smart businesses through the combination of several intelligent machines.
To that end, automation can be understood in terms of two layers. The first layer is autonomy, in which individual machine elements become smarter under local constraints. The second layer is a separate collaborative layer in which machines are combined under macro constraints and the entire system gets smarter. Viewing layers separately in this way, makes it possible to understand the functionality and capabilities required for local versus entire and component versus system more appropriately. Such relationships can be observed in nature between individuals and groups in organisms, and in relationships between individuals and organizations in human society, in the sense that importance is placed on both aspects, and there is a certain necessity in it (see Figure 1).
Figure 1—Autonomous and Collaborative Automation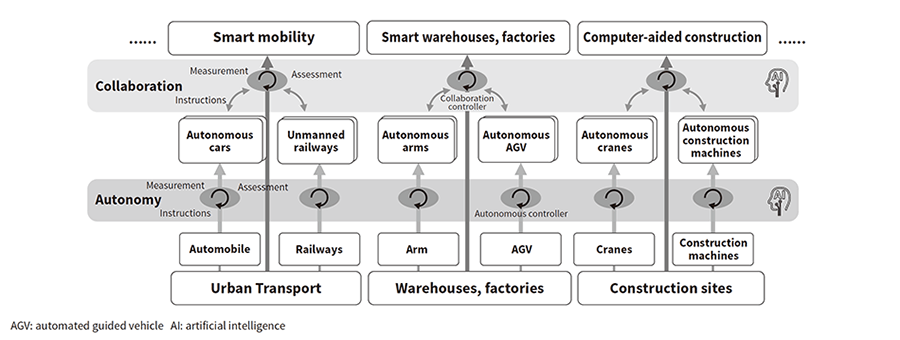 “Autonomy” turns the various machines operated by humans into intelligent and smart entities, and “collaboration” links them to work together to make all tasks across the entire workplace smart.
“Autonomy” turns the various machines operated by humans into intelligent and smart entities, and “collaboration” links them to work together to make all tasks across the entire workplace smart.
Mechanisms for linking multiple distributed elements and integrating control with smart management are being discussed and progressing under various contexts, for example the Internet of Things (IoT), big data, edge control systems, etc. A typical form of these involves a centralized management system in which the layer that manages the entire system (hereafter “supervisory (collaborative) intelligence”) collects and analyzes a lot of information, such as sensor data, etc., from each element positioned on the “edge” in order to precisely control each of them for overall optimization (see left side of Figure 2). Whereas the system respects the autonomy of each element as much as possible. The supervisory intelligence collects as little information as possible from each element (hereafter “autonomous agent”), and instead takes an overall bird's eye view of the whole situation through its own means (see right side of Figure 2). It makes an assessment based on that overall bird's eye view, and provides information and suggestions necessary to improve overall behavior to each autonomous agent. The rest is left to the autonomous action of those agents.
The following points can be listed as advantages of overall control based on this concept.
Figure 2—Concept of Full Control in an Autonomous and Collaborative Robot System Hitachi’s proposed system guides the whole situation in the desired direction while allowing maximum autonomy for each autonomous agent.
Hitachi’s proposed system guides the whole situation in the desired direction while allowing maximum autonomy for each autonomous agent.
The concept of separation of autonomous and collaborative roles and overall integration as described in the previous chapter can be applied to automation in industrial fields such as the following.
Here, a distribution warehouse is used as an example application.
A distribution warehouse fulfills an essential role as a hub that smoothly connects manufacturing and distribution, and as a central part that receives items and redistributes them. Distribution warehouses have been especially strained by the rapid growth of the e-commerce market in recent years, which is growing in scale and size day by day, and already exceeds 300 trillion yen. Moreover, distribution warehouses must handle a huge variety of products, and there is a need for high-level operations that can answer the continuous demand for “cheap, fast, and high quality.”
Typical operations in the warehouses include delivery and distribution, storage and sorting, as well as additional operations such as inspection. Looking at these physical tasks, it can be seen that transportation and manipulation are fundamental, and numerous other operations are combined with those.
With regard to transportation, Hitachi has commercialized intelligent automated guided vehicles (AGV)(2), which move without a guide road using a self-created map, one is called Racrew (compact automated guided vehicle)(3), which moves under shelf racks to lift and carry them. And, regarding the function of manipulation, Hitachi has prototyped a “picking out robot system”(4), which combines a mobile cart with a hand robot, and has commercialized part of its functionality as an autonomous mobile robot(5).
What's more, with Hitachi's sights on automation of the entire warehouse, along with Hitachi Transport System, Ltd., it is working on developing the automated warehouses of the future(6).
In promoting the automation of entire warehouse operations, and to be flexible and facilitate evolution in line with operating conditions and technological development, Hitachi aims for modularization that distinctly separates the functions of each automation element and enables numerous tasks to be performed in any combination.
For example, using a future sorting system based on Racrew, Hitachi is developing technology to make work completely free of human staff, including picking and sorting tasks. Here, the transport cart and the picking robot play distinctly separated roles, though the tasks as a whole are performed in collaboration. Depending on the amount of work, the scale can be freely adjusted, such as changing the number of carts or robots used, and the function and performance of each can be changed flexibly.
What's more, not only sorting functionality, but also the automation of various other tasks, from warehousing to distribution; a wide variety of flexible, easy-to-update whole systems are configured by the linking and collaboration of many different robots and devices that are separated by function. This is outlined in Figure 3. Various elements including people work autonomously and collaborate as a whole. With regard to collaborative control, management is conducted appropriately based on not only the circumstances in the actual warehouses, but also on the circumstances of the production, distribution, and consumers positioned upstream and downstream from them.
Figure 3—Autonomy and Collaboration in Distribution Warehouses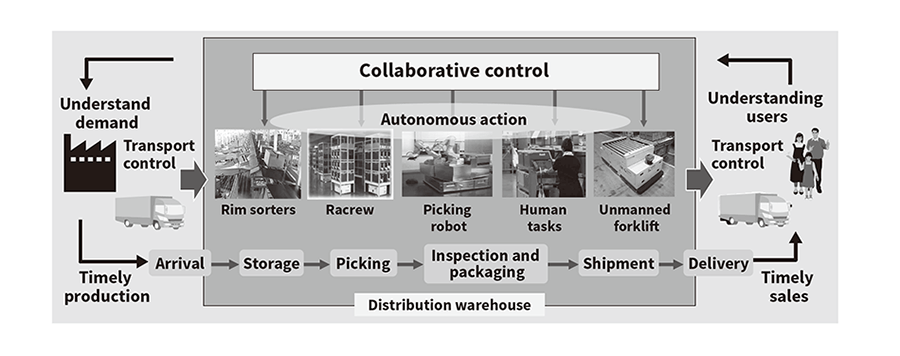 Warehouse operations are optimized by the appropriate collaboration of the various material handling devices, robots, and people that operate autonomously.
Warehouse operations are optimized by the appropriate collaboration of the various material handling devices, robots, and people that operate autonomously.
This subsection describes specific actions of an autonomous and collaborative robot system, using a transport robot (AGV) and an arm robot as an example.
The AGV carries a case containing various different goods and the arm robot picks out the necessary goods from among those various goods. Here, it is assumed that both robots have independent intelligence (AI) and can operate autonomously. That means that the AGV can move on a free course, and the arm robot can recognize, select, and grip only the necessary items in the case. When thinking about the efficiency of such a system, it is desirable to have the arm robot select and take the correct items from the AGV while it is in motion.
However, as shown on the left in Figure 4, with a system approach that only controls the observation information of two robots, problems such as recognition being delayed and, depending on how goods are stacked, the movement of the AGV being too fast, will result in a failure to grip the item even if such information and control are integrated. Therefore, to ensure reliable operation, it is necessary to stop the AGV temporarily while the arm robot takes out the items.
In response to this, a new AI has been added to the supervisory intelligence of the system under discussion, which is observable from a separate viewpoint (see the right side of Figure 4). This AI takes a picture of the inside of the case before the AGV reaches the front of the robot, then, using deep learning technology, it estimates where the item to be taken out is and how much the AGV should reduce its speed so that the item can be taken out safely. Because the system communicates its assessment to the AGV and the arm robot in advance, the AGV and the arm robot can then carry out collaborative work reliably and efficiently as part of the whole system while maximizing their respective capabilities. Moreover, the advantages of an autonomous decentralized system, such as the flexibility of re-combination and local robustness, are retained.
Hitachi has actually built a system based on the concept outlined above and verified its effectiveness (see Figure 5). In the verification test, the speed of the AGV varied by up to 0.5 m/s, and the case that held the items included products that were difficult to take out, for example because they were placed at an angle, etc. As stated above, the supervisory intelligence transmits the necessary information to the two autonomous machines, and without reducing the speed wherever possible this enabled a secure grip of the items without failure. This result made it possible to reduce tasks that conventionally took 13 seconds to just 8 seconds(4).
Figure 4—Collaboration between AGV and Arm Robot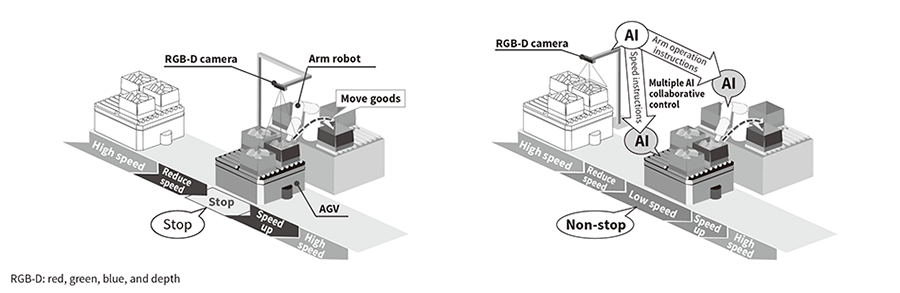 In the conventional system (left), the AGV stopped for the arm robot. But, with the addition of a new AI, non-stop tasking is achieved.
In the conventional system (left), the AGV stopped for the arm robot. But, with the addition of a new AI, non-stop tasking is achieved.
Figure 5—Operation of Actual Machine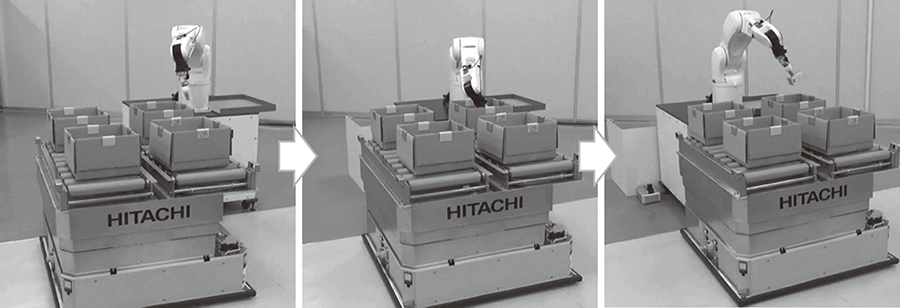 Appropriate arm movements are made dependent upon the speed of the AGV and the way goods have been loaded.
Appropriate arm movements are made dependent upon the speed of the AGV and the way goods have been loaded.
Hitachi's autonomous and collaborative robot system seeks to achieve a synergy that emerges from collaboration between humans and diverse robots. In other words, it does not merely seek to make simple assumptions on the nature of its parts, but rather seeks to build an entire system that looks at the bigger picture.
For a sustainably growing society, Hitachi will continue to develop and implement robot technology that aims to enhance a variety of tasks through automation, and further seeks the synergy that emerges from the collaboration of those enhanced tasks.
