[ⅱ]Autonomous Driving and Electrification for Safety and Security
Hitachi is developing three electronic control technologies for chassis subsystems to improve safety, security, and comfort in the era of autonomous driving. The steering system features linkless steer-by-wire for improved safety and layout flexibility, as well as high responsiveness for enhanced emergency avoidance performance and disturbance stability. A next-generation input system is also currently under development for replacing the conventional steering wheel. For the brakes, an electro-mechanical brake (“Smart Brake”) is being developed that is expected to improve vehicle safety and economy through the use of brake-by-wire for high responsiveness and precise control. The lack of piping and other hydraulic equipment also makes it easier to install in vehicles. The suspension features a full electric active suspension system for overwhelming comfort and responsive performance. Development is also progressing on regeneration techniques that use vibration energy. Through these systems, Hitachi is contributing to the building of a new mobility society.



Along with safety and security, the era of autonomous driving will require both personally owned vehicles (POVs) and mobility-as-a-service (MaaS) to provide comfortable spaces where occupants freed from the task of driving can make good use of their time without stress. Integrated control of chassis subsystems such as steering, brakes, and suspension is needed to drive the vehicle in accordance with the commands of the upper-level controller, which is the brain of the vehicle. Systems are needed that can minimize unpleasant shaking and vibration for vehicle occupants while also ensuring safety through precise and responsive control both of the cornering and braking forces on each wheel and the vertical reaction forces that influence these forces.
This article presents three innovative chassis electronic control subsystems that Hitachi Astemo, Ltd. is working on to realize this new value.
Advances in CASE (connected, autonomous, services & shared, and electric technologies for vehicles) are being accompanied by wider use of advanced driver assistance systems (ADAS) and rapid progress on the practical deployment of autonomous driving (AD). In light of these trends, the steering system must provide both compatibility with AD/ADAS and comfort and convenience during manual driving. Furthermore, to provide wider freedom in cabin design, a steering system without mechanical connection between the cabin and chassis is desirable. To meet these needs and contribute to the evolution and expansion of safety technology, Hitachi Astemo has been working on the development of a linkless steer-by-wire system.
Figures 1 and 2 show an overview of the system and its functions.
To achieve linkless steer-by-wire, the power supply, sensor, communication, and drive circuits have full dual redundancy, and the system is designed for high reliability so that it can continue to operate even in the event of a system failure.
For driver comfort and convenience, the steering gear ratio (ratio of steering angle to steering wheel turning angle) can be set as desired according to the driving situation. The system provides safe and secure driving while also reducing driver fatigue by ensuring that the steering wheel provides the feedback that the driver needs to drive safely while also eliminating unnecessary road vibrations. The system also corrects automatically for any negative vehicle behavior caused by sudden crosswinds or other factors and improves emergency avoidance performance by increasing the responsiveness of tire steering and the vehicle yaw rate.
Other features include compatibility with new steering methods that do not use a steering wheel, are inexpensive, and have the potential to help free up interior space in the vehicle and to make driving less effortful for the elderly.
Figure 1 — Linkless Steer-by-wire and Compatibility with New Steering Systems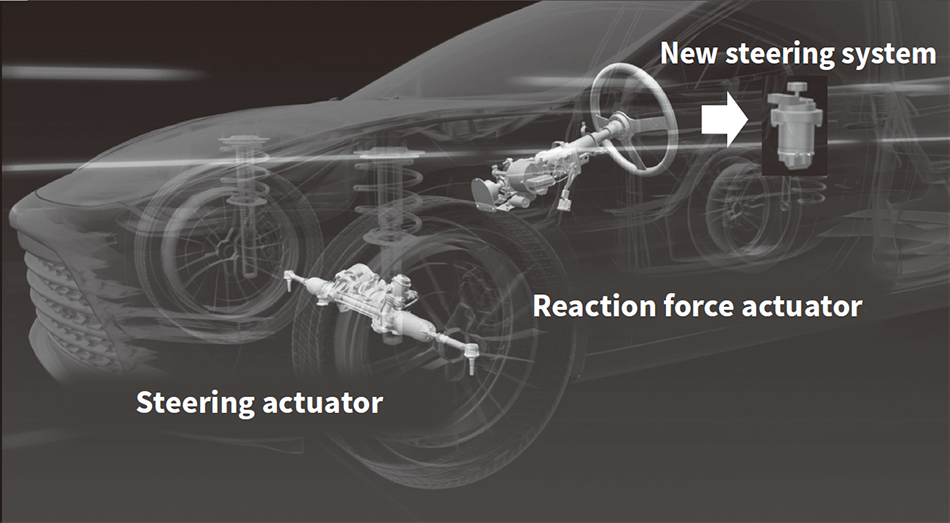 This system consists of a reaction force actuator and a steering actuator. The reaction force actuator is suitable for use in new steering systems that do not use a steering wheel.
This system consists of a reaction force actuator and a steering actuator. The reaction force actuator is suitable for use in new steering systems that do not use a steering wheel.
Figure 2 — Configuration and Functions of Linkless Steer-by-wire System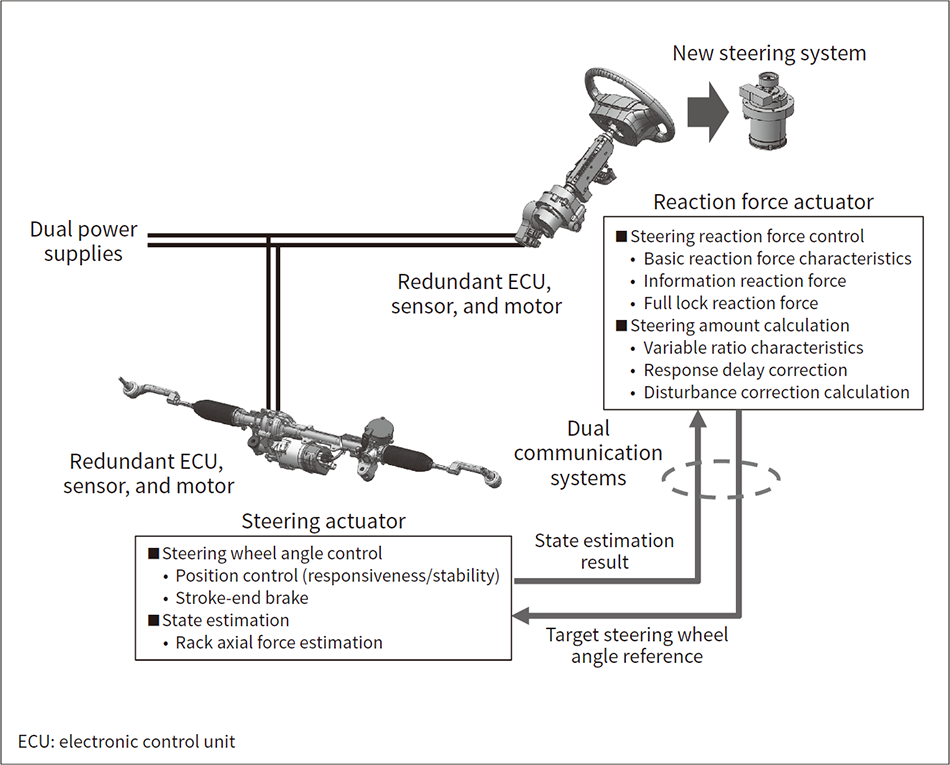 This system provides responsive and precise steering actuator control to meet the requirements of both drivers and autonomous driving systems.
This system provides responsive and precise steering actuator control to meet the requirements of both drivers and autonomous driving systems.
Hitachi Astemo is developing electric brake systems to improve safety, comfort, and environmental performance.
Past product developments have including anti-lock braking, electric actuation, and electric parking brakes. In order to meet the requirements of electric powertrains and autonomous driving, which are expected to expand rapidly in coming years, brake systems will require ever higher reliability, responsiveness, and control performance. Brake-by-wire (BBW) systems are also under development that allow for both driver operation and control by the vehicle, providing a better brake feel for the needs of drivers who want to enjoy driving.
The existing BBW system is an electro-hydraulic brake (EHB) that utilizes the hydraulic pressure generated by an electric motor and pump. However, in terms of responsiveness and control performance, the electro-mechanical brake (EMB) which uses an electric motor to directly control the braking force is the best solution. Hitachi calls this EMB “Smart Brake.”
Figure 3 shows the configuration of the Smart Brake system.
In place of the conventional hydraulic calipers, the Smart Brake actuators are placed on each wheel and connected to the central controller via the wire harness instead of hydraulic pipes. The driver’s braking command is acquired by a pedal simulator or similar device. The central controller calculates the braking force for each wheel, taking into account the vehicle status, and sends commands to the actuators for each wheel to control the braking force. In addition to the regular service brake, vehicle stability control, and parking brake function, the highly responsive, precise, and individual wheel actuator control can improve vehicle safety and comfort and also extend the vehicle driving range through better cooperative regenerative braking performance. System reliability is maintained through redundant power supply, communication, and controllers, allowing the various functions to continue operating even in the event of a single point failure. Furthermore, eliminating the hydraulic piping improves the vehicle assembly process and layout design flexibility, making the brake system suitable for future electric powertrains and autonomous driving vehicles.
Figure 3 — Smart Brake System Configuration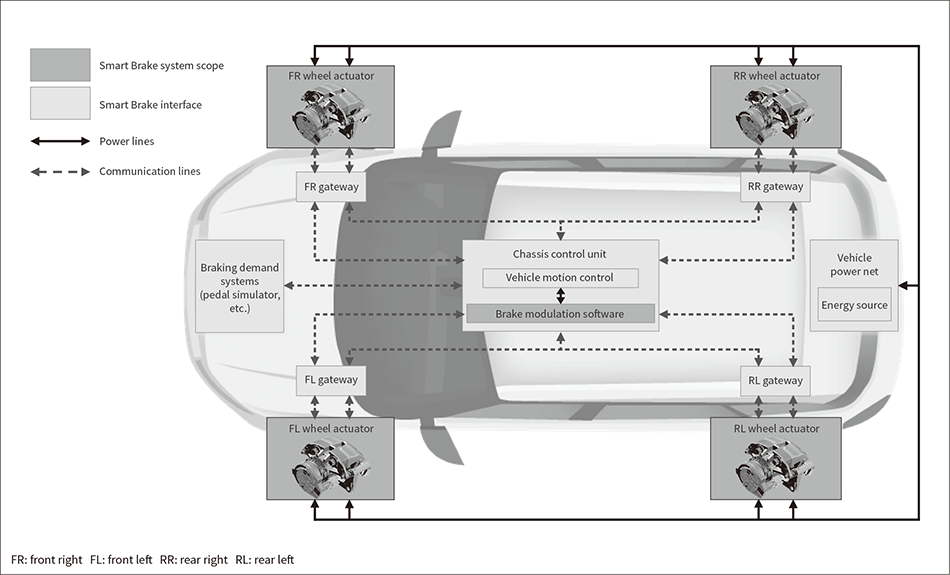 The Smart Brake actuators are placed on each wheel and connected to the central controller via the wire harness instead of hydraulic pipes. This system achieves highly responsive, precise, and individual braking force control for each wheel based on the braking commands from the driver and the autonomous driving system.
The Smart Brake actuators are placed on each wheel and connected to the central controller via the wire harness instead of hydraulic pipes. This system achieves highly responsive, precise, and individual braking force control for each wheel based on the braking commands from the driver and the autonomous driving system.
Figure 4 — Electromagnetic Active Suspension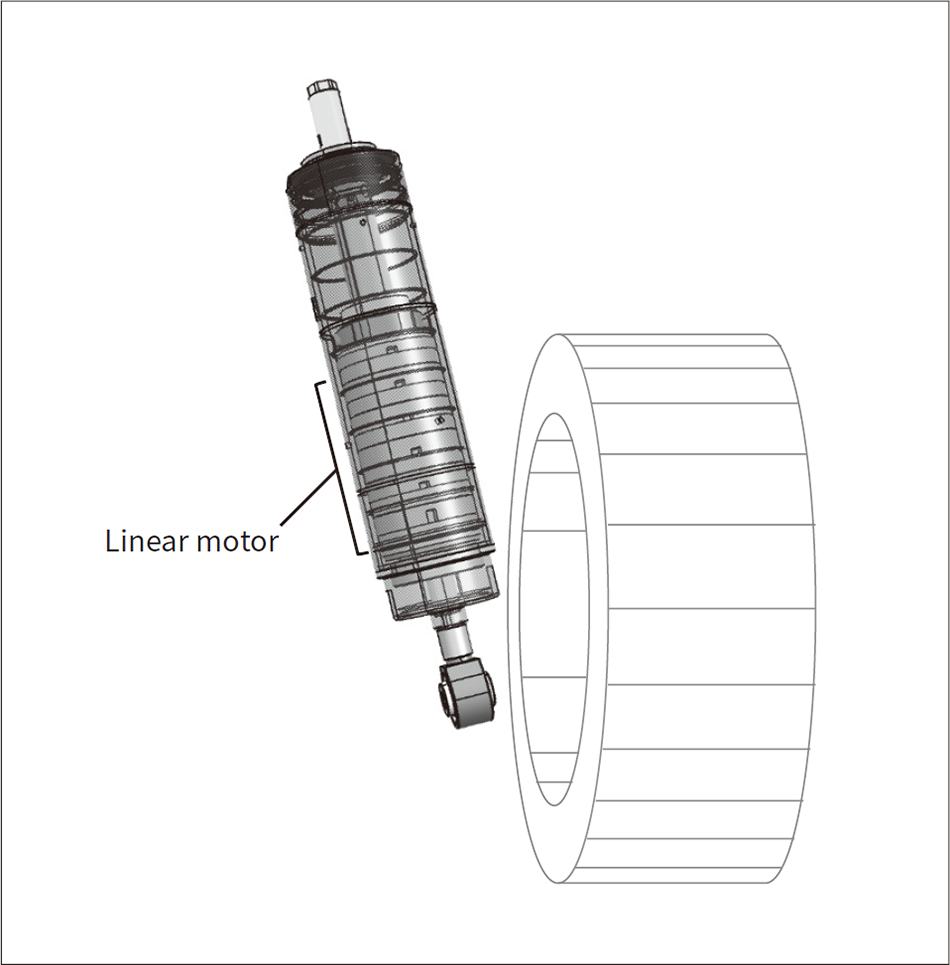 The electromagnetic active suspension incorporates a cylindrical permanent magnet linear motor. Because the electromagnetic force generated by the motor is directly converted into thrust, control is possible up to the high-frequency range.
The electromagnetic active suspension incorporates a cylindrical permanent magnet linear motor. Because the electromagnetic force generated by the motor is directly converted into thrust, control is possible up to the high-frequency range.
Along with enhanced dynamic performance for safer driving, active suspension can reduce car sickness and fatigue by improving ride comfort, significantly reducing unpleasant shaking of the vehicle body such as roll and pitch while actively responding to uneven road surfaces. With integrated chassis control, active suspension can distribute the ground load of the four wheels appropriately based on the driving conditions, thus improving hazard avoidance and stopping performance by steering and braking, and contributing to improved vehicle dynamics and safety.
Conventional systems are typically hydraulic systems made up of many devices such as pumps, valves, and piping. Fully electric systems, in contrast, can reduce energy consumption, be oil-free and environmentally friendly, and can improve the vehicle layout, ease of installation, and ease of maintenance.
Figure 4 shows an electromagnetic active suspension developed by Hitachi that uses a linear motor system.
The electromagnetic force is generated by a permanent magnet (PM) induction linear motor made up of a coil and a permanent magnet. The desired thrust and stroke are achieved by controlling the phase current according to the signal from the stroke sensor.
The linear system achieves superior responsiveness and reliability because the electromagnetic force from the motor is applied directly to the suspension without any mechanical mechanism. This system reduces shocks from the road surface and even jerky, high-frequency vibrations, allowing occupants to perform non-driving tasks with less stress and delivering a level of ride comfort equivalent to that on a favorable road surface. The vibration energy can also be regenerated to further improve system efficiency.
Figure 5 — Hitachi In-wheel Motor Drive This multipurpose electric vehicle (EV) platform features high-density, modularized in-wheel motors.
This multipurpose electric vehicle (EV) platform features high-density, modularized in-wheel motors.
Hitachi is supporting mobility in the age of autonomous driving both through advances in vehicle dynamics and ride comfort performance and through development work targeting carbon neutrality and a wide range of other societal demands. Figure 5 shows an electric vehicle (EV) platform proposed by Hitachi that is equipped with innovative electronic control subsystems.
The three electrification technologies presented in this article are expected to provide more advanced chassis performance and to reduce the burden placed on the environment by the design, manufacture, and use of vehicles. As described here, development work at Hitachi aims to contribute to the realization of a new sustainable mobility society by increasing freedom in vehicle layouts, by making assembly lines more compact, and by improving ease of maintenance in the market.
