March 29, 2024
Hitachi, in collaboration with Fraunhofer IESE,*1 has developed a technology that dynamically switches safety functions to ensure safe, efficient harmony between people and machines that operate autonomously (hereinafter, “autonomous machines”) as they evolve and also confirmed the technology’s effectiveness by implementing and testing it in the context of a self-driving vehicle.
Aiming to provide global customers with highly reliable autonomous control solutions, Hitachi has been working jointly with Fraunhofer IESE, a leading player in the systems engineering in areas such as Automotive & Mobility, Industrie 4.0 & Production, Agriculture & Food, and Digital Healthcare.*1 The collaboration focus was mainly on research and development of safety design engineering and technology solutions for collaboration between humans and autonomous machines since 2021.*2*3
The technology announced here is based on previously developed system control technology for ensuring both human safety and efficiency in a work environment where people and autonomous machines co-exist and operate in the same area. The new technology further improves efficiency by dynamically switching control functions as the system evolves while assuring safety (Figure 1).
Demonstration and field testing verified the effectiveness of the technology in a situation where a self-driving vehicle equipped with the developed technology approached a pedestrian crossing. The results confirmed that as the rate of pedestrian rule observance increased, the vehicle safety function automatically switched and the frequency of vehicle stopping decreased while safety was being ensured (Figure 2).
Building on this result, Hitachi and Fraunhofer IESE will next work on creating a social infrastructure equipped with both safety and productivity through safe and efficient collaboration between people and autonomous machines. In this way, they will contribute to the realization of a safer and more efficient society.
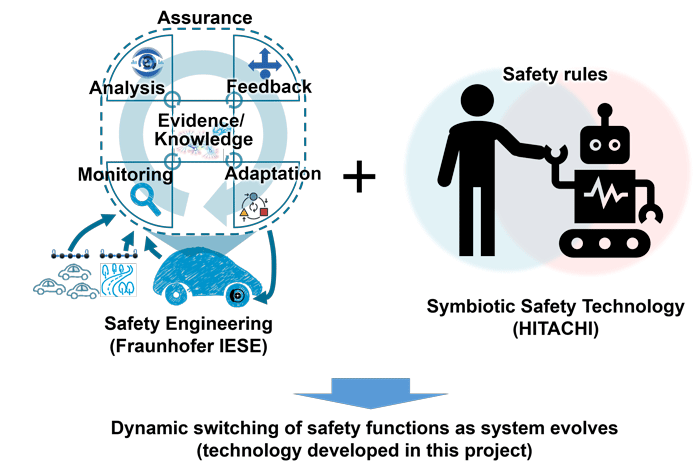
Figure 1. Concept of achieving both safety and efficiency, combining Fraunhofer’s dynamic safety assurance with symbiotic safety*2
(Dynamic safety assurance: Design technology aimed at safety, in which the system safety functions are dynamically switched as an autonomous machine goes through the loop of environment monitoring, analysis, feedback, and adaptation.)
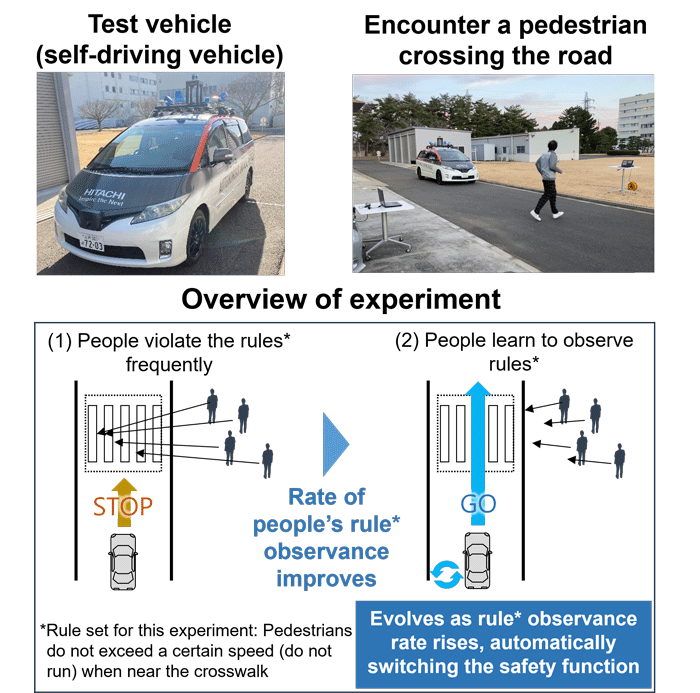
Figure 2. Details of the experiment
A test vehicle in self-driving mode encounters pedestrians crossing the road. (1) When there are frequent cases of pedestrians running to cross right in front of the vehicle (rule violation), the vehicle is automatically stopped by the safety function. (2) As more pedestrians observe the proper walking speed and refrain from dashing into the pedestrian walkway (a rise in rule observance rate), the vehicle safety function automatically switches over, reducing the frequency of stops while maintaining safety. (Note:During the experiment, for safety purposes (to minimize the risk of accidents), it is mandatory for two individuals, a driver and an assistant, to be present in the autonomous vehicle at all times.)
For more information, use the enquiry form below to contact the Research & Development Group, Hitachi, Ltd. Please make sure to include the title of the article.
